| Robocampeones 2005 |
 |
 |
 |
| EQUIPAMIENTO TECNOLÓGICO - Hardware |
| Escrito por Ángel de Dios Rosso-Monserrat Pérez Lobato |
| Lunes, 23 de Mayo de 2005 14:00 |
 El pasado 12 de Mayo se celebró en la Universidad Rey Juan Carlos, en su campus de Móstoles, la segunda edición del Campeonato de Construcción de Robots Móviles Autónomos para alumnos de Educación Secundaria Obligatoria y Bachillerato de centros públicos de Madrid organizado por el Departamento de Informática, Estadística y Telemática de la Universidad Rey Juan Carlos y con el patrocinio del Ministerio de Industria, Turismo y Comercio, la Consejería de Educación de la Comunidad de Madrid y de las empresas Prodel y National Instruments
El objetivo de este campeonato es difundir la ciencia y la tecnología fomentando el interés por el mundo de la robótica entre los estudiantes, que presentan sus construcciones a diversas pruebas, enfrentándolas a las de los compañeros de otros centros. El pasado 12 de Mayo se celebró en la Universidad Rey Juan Carlos, en su campus de Móstoles, la segunda edición del Campeonato de Construcción de Robots Móviles Autónomos para alumnos de Educación Secundaria Obligatoria y Bachillerato de centros públicos de Madrid organizado por el Departamento de Informática, Estadística y Telemática de la Universidad Rey Juan Carlos y con el patrocinio del Ministerio de Industria, Turismo y Comercio, la Consejería de Educación de la Comunidad de Madrid y de las empresas Prodel y National Instruments
El objetivo de este campeonato es difundir la ciencia y la tecnología fomentando el interés por el mundo de la robótica entre los estudiantes, que presentan sus construcciones a diversas pruebas, enfrentándolas a las de los compañeros de otros centros.
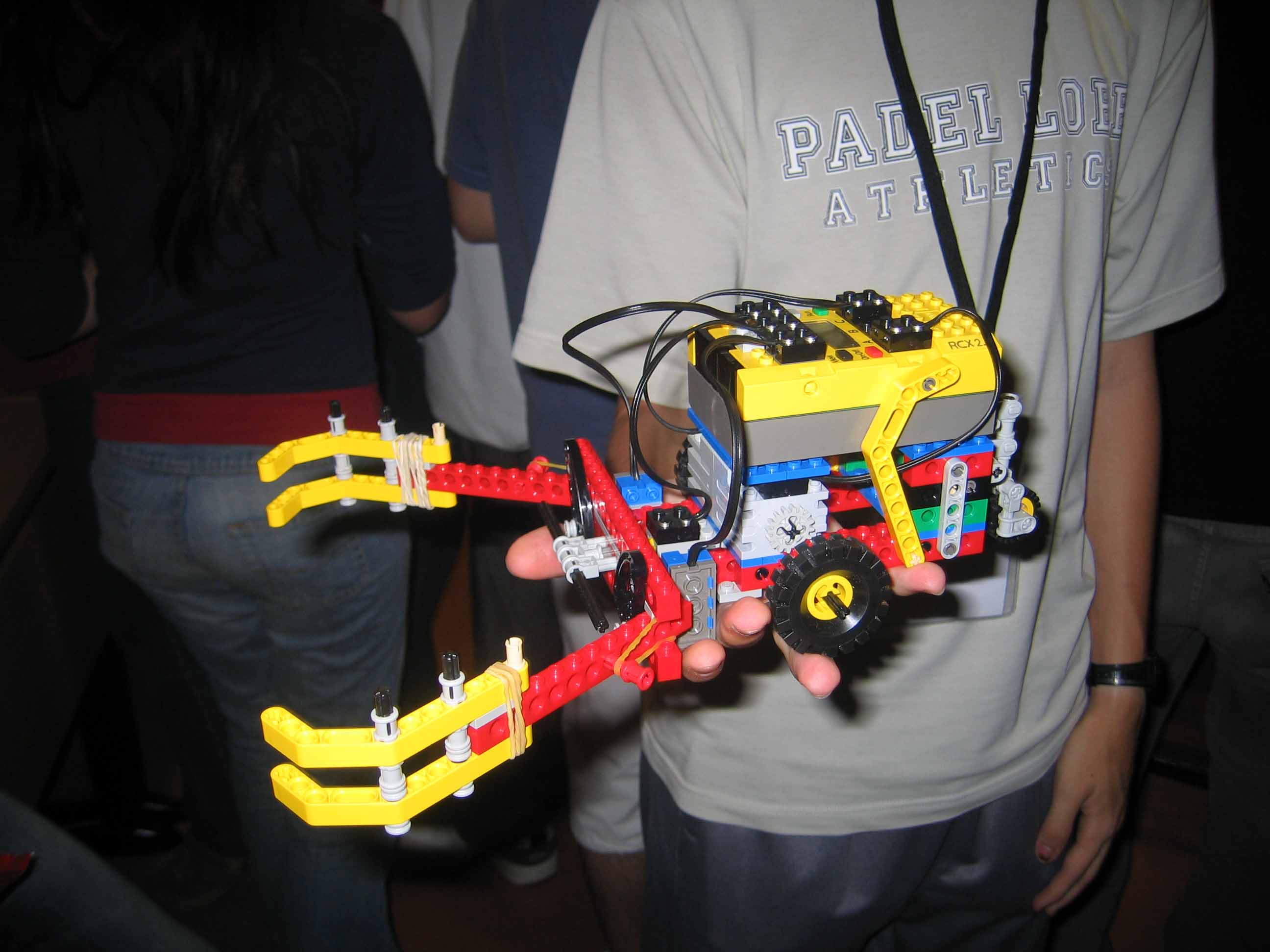
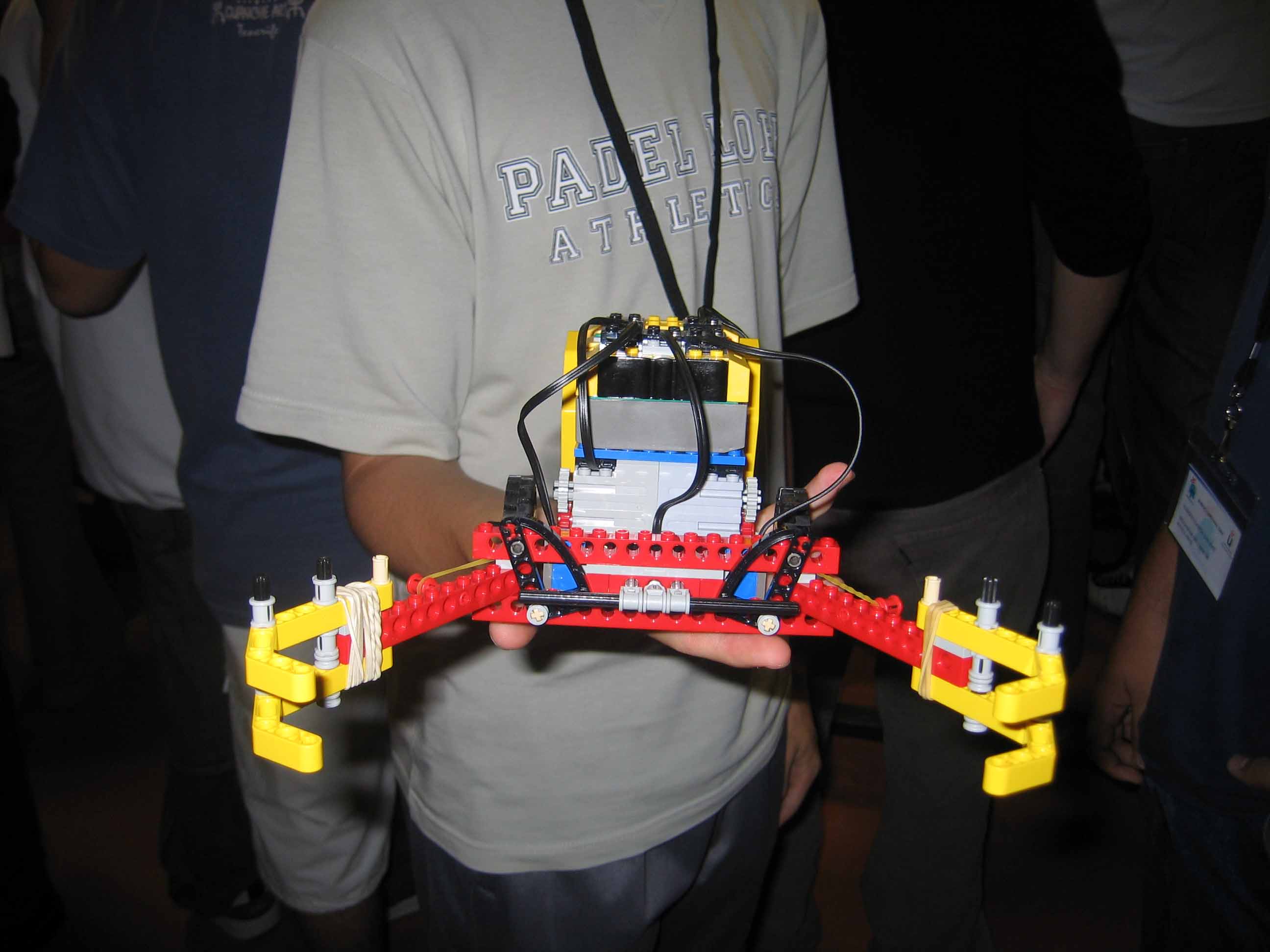
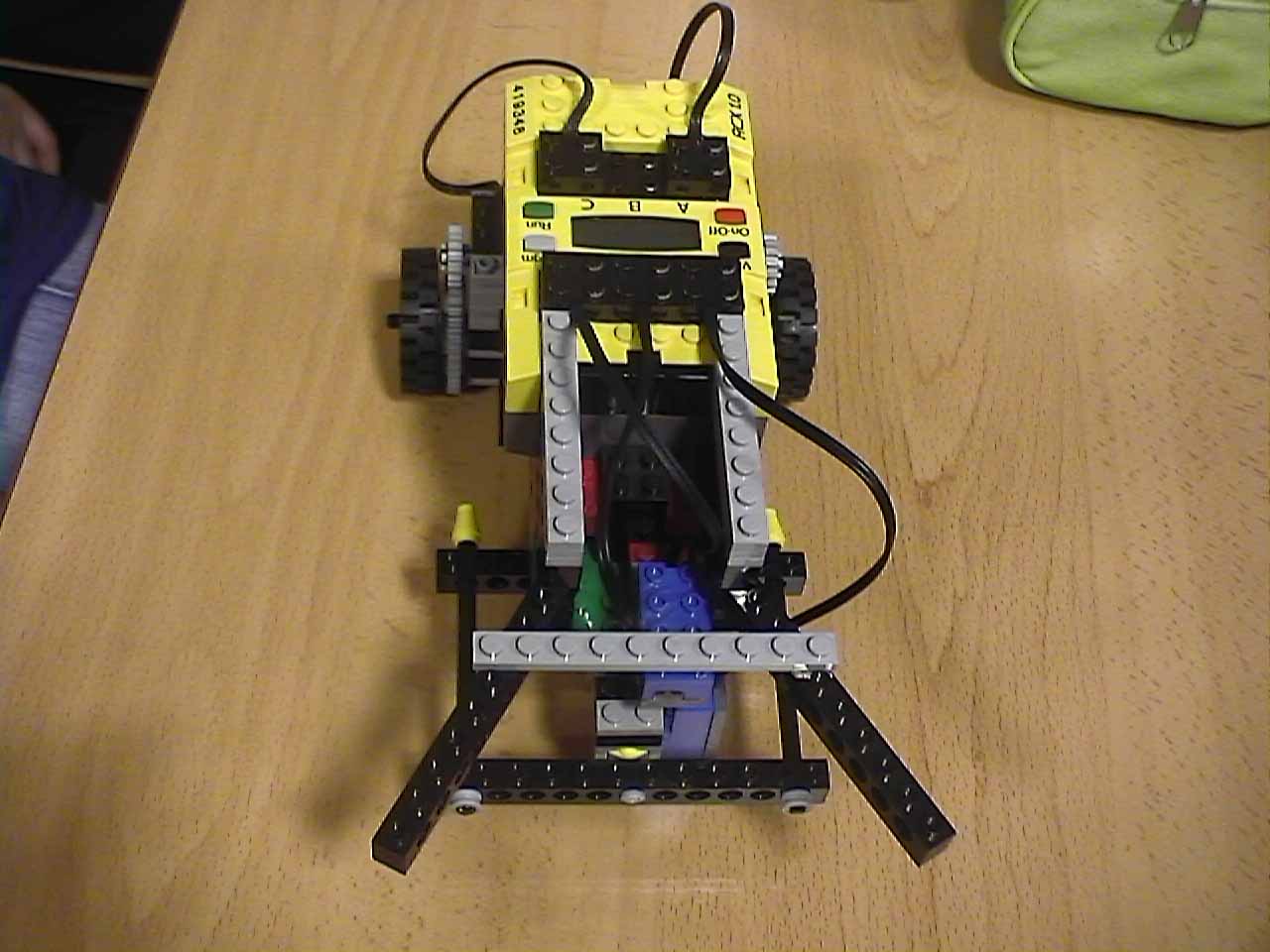
Los robots presentados deben estar construidos con piezas y sensores de LEGO dotándoles de autonomía y movimiento mediante el RCX de la misma marca y lógicamente programados mediante ROBOLAB, un entorno de programación visual para acciones de control del RCX de LEGO, que mediante el sistema de arrastrar y soltar permite desarrollar de forma sencilla rutinas complejas de control. La ventaja de este sistema frente a otros del mercado es que la controladora es totalmente autónoma, recibiendo las instrucciones desde el ordenador mediante un emisor de infrarrojos, de una sola vez, y permitiendo una gran autonomía gracias a su memoria y alimentación independiente mediante baterías.
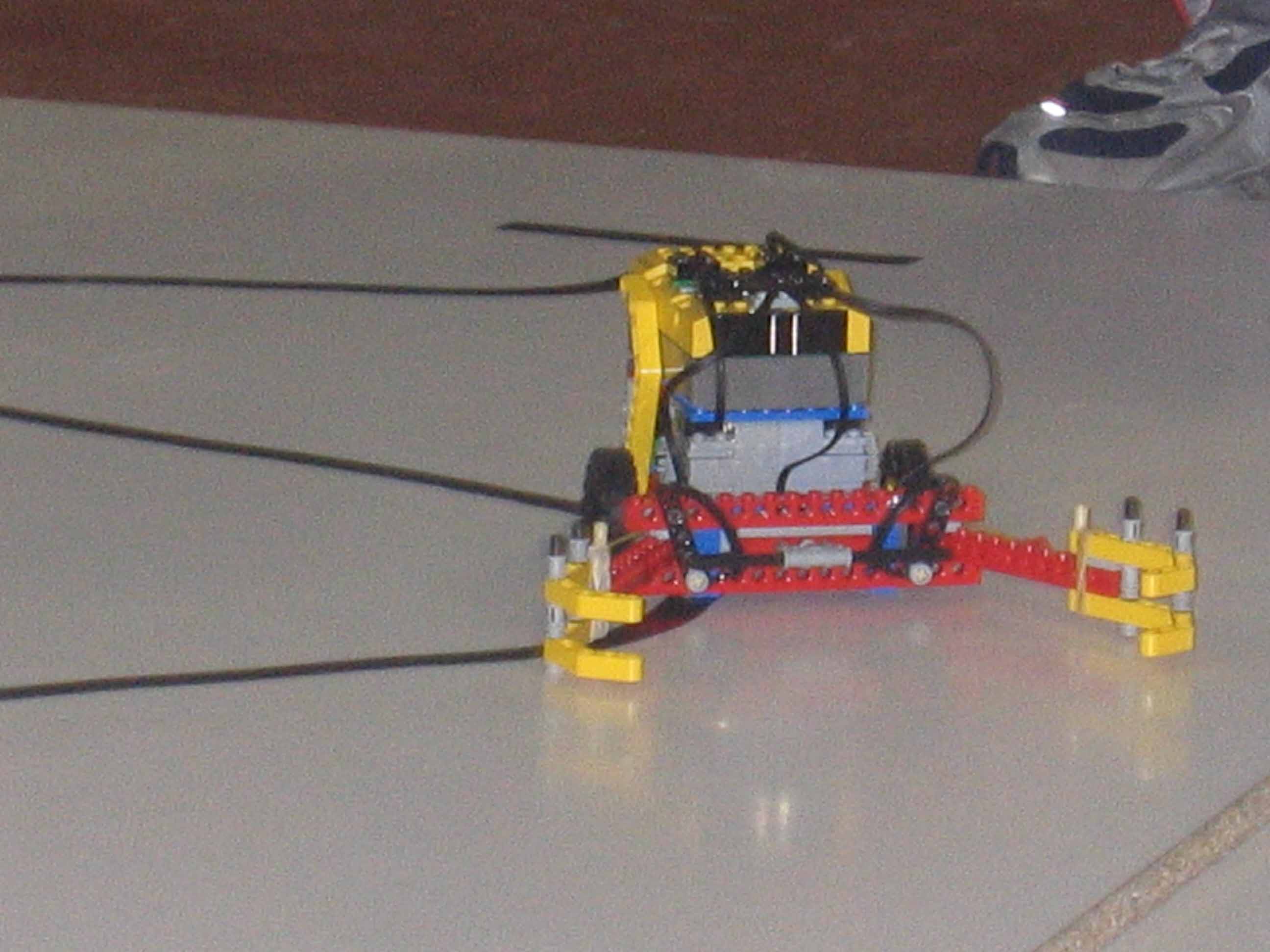
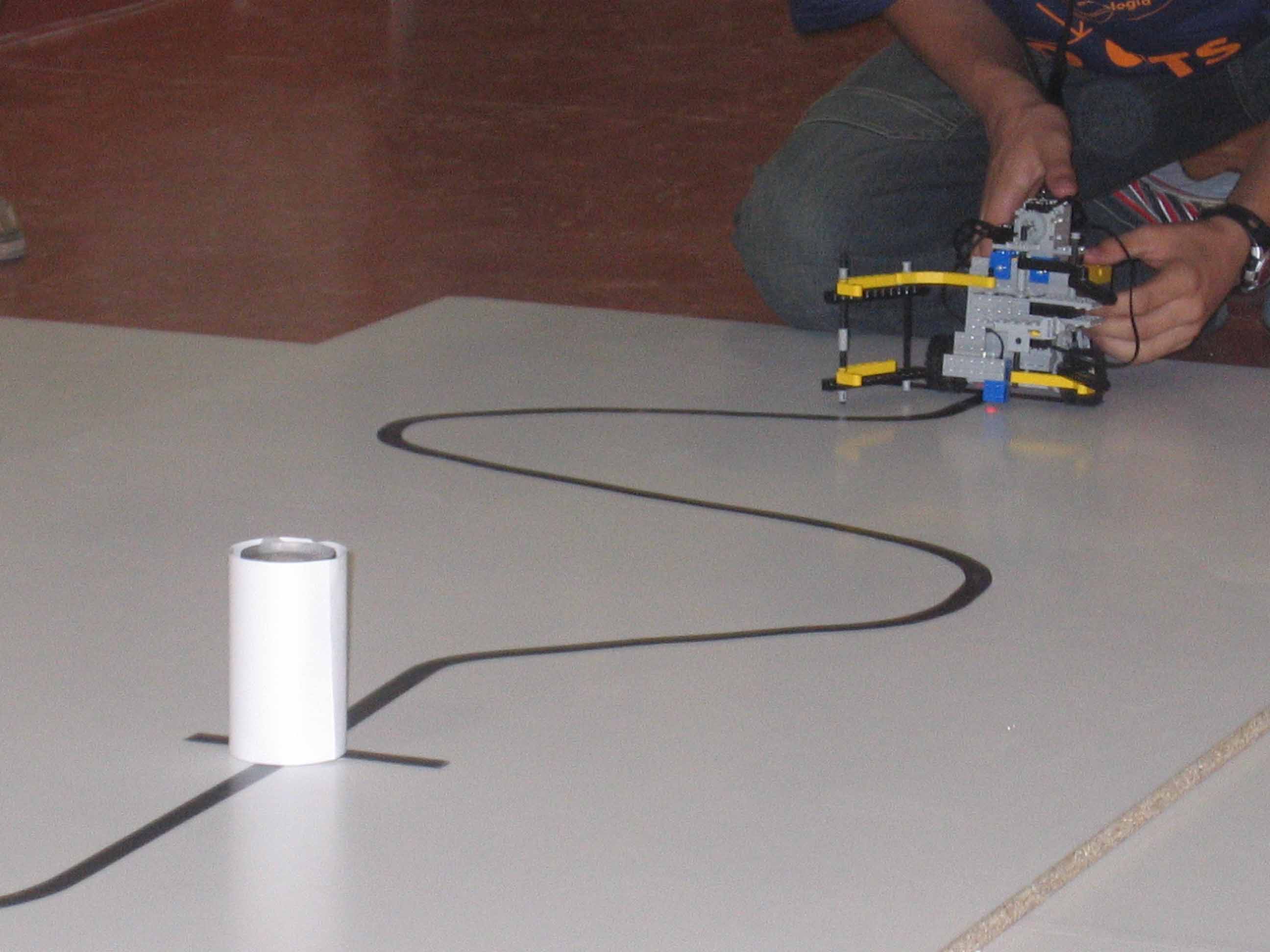
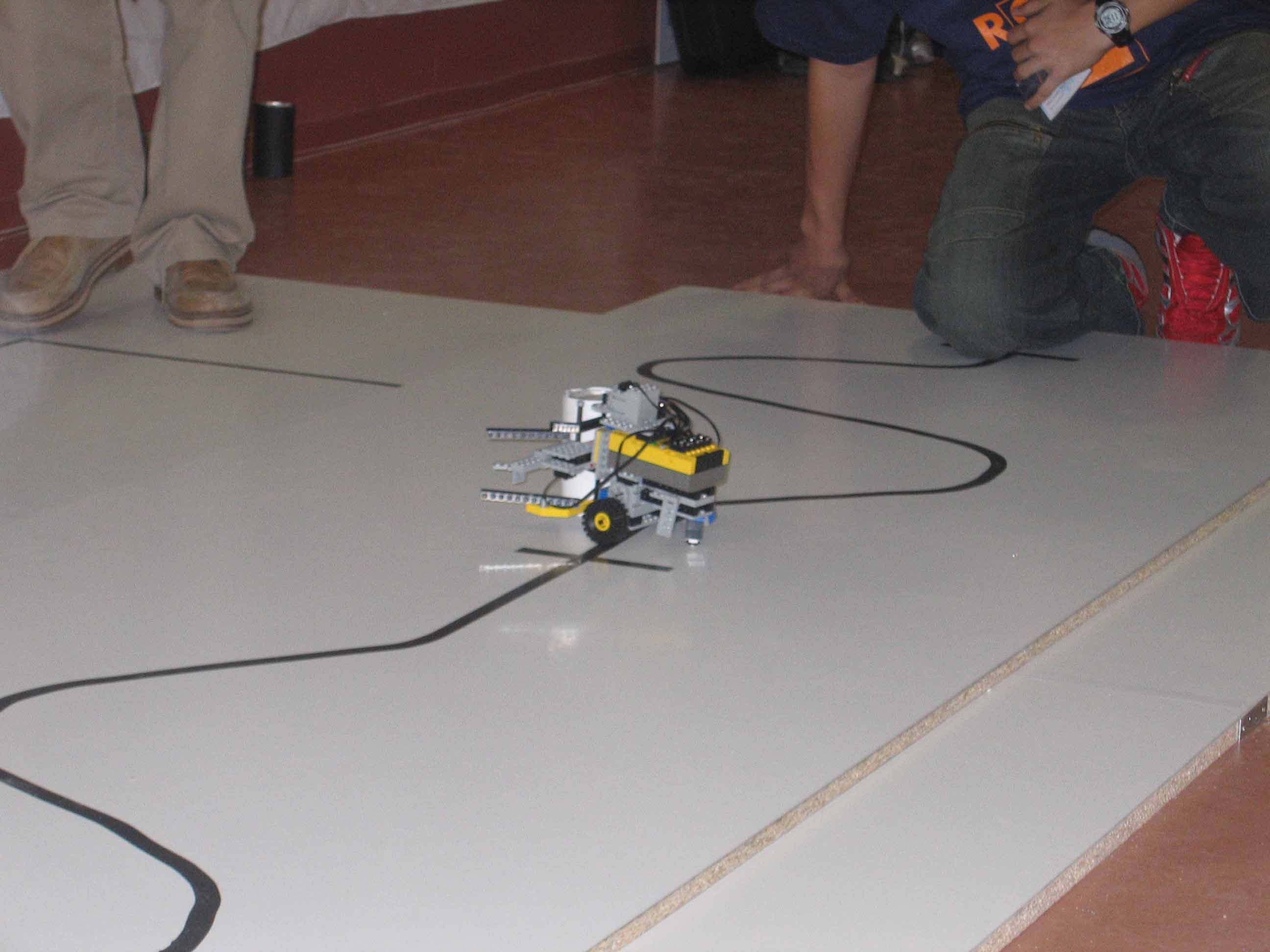
PRUEBA DEL PAÑUELO CURVOLa primera prueba de la competición consistió en una adaptación del juego clásico del pañuelo a este entorno robotizado. Las construcciones debían seguir un recorrido marcado por una línea negra, sobre una superficie blanca, y llegar antes que su contrincante a alcanzar un bote blanco, agarrarlo, y realizar el camino inverso hasta la posición original. El robot que antes llegase con el bote a la posición original sería el ganador. El desarrollo de la prueba fue bastante entretenido, ya que algunos robots eran más rápidos al completar el recorrido marcado por la línea, otros eran más eficaces cogiendo la lata, pero lógicamente también los había menos coordinados e incluso algunos que tenían problemas para mantener agarrada la lata en el camino de vuelta. Como curiosidad se dieron algunos casos de robots que llegaron al mismo tiempo al punto intermedio y se enganchaban unos a otros en su intento de agarrar la lata blanca.
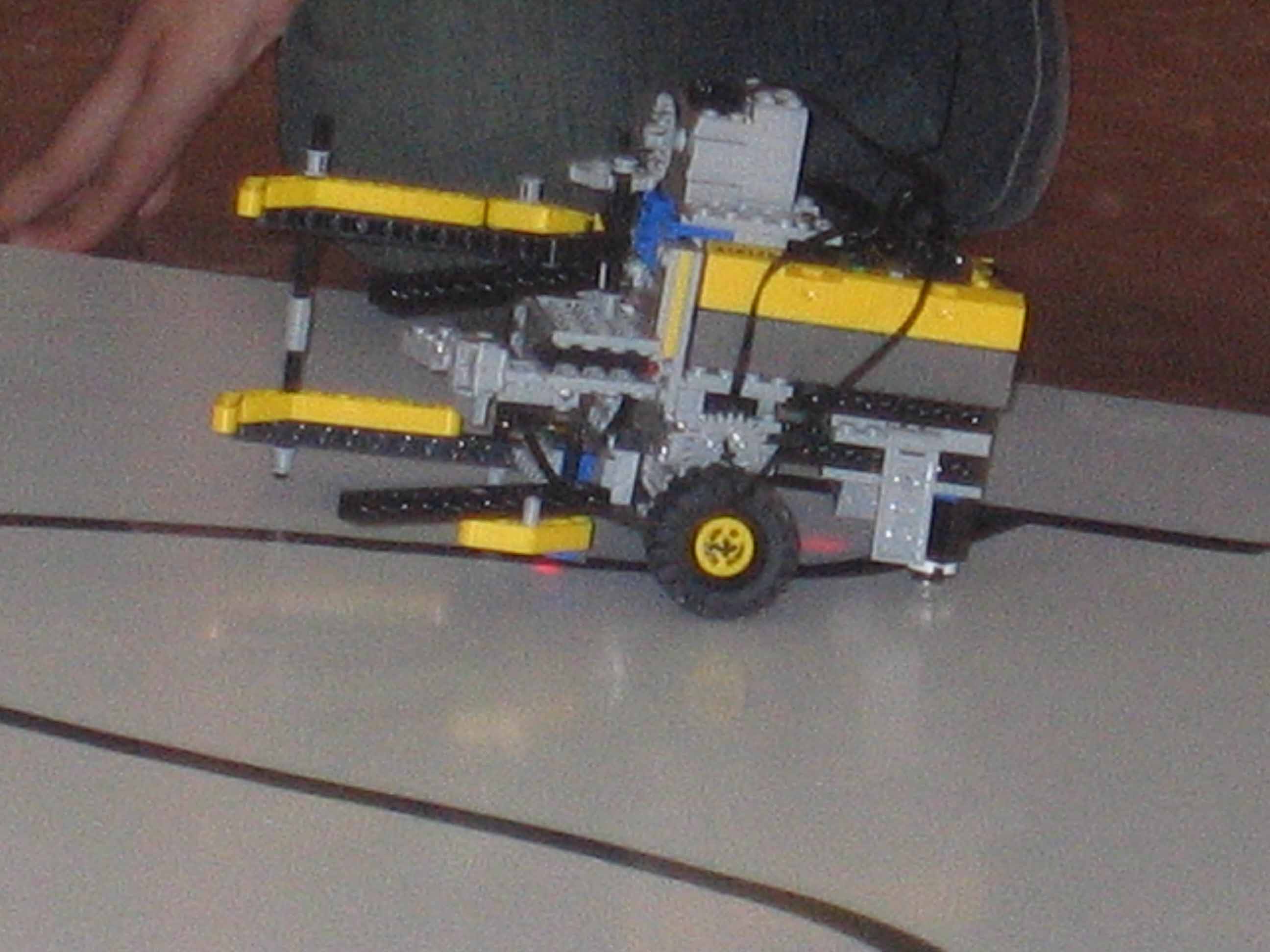
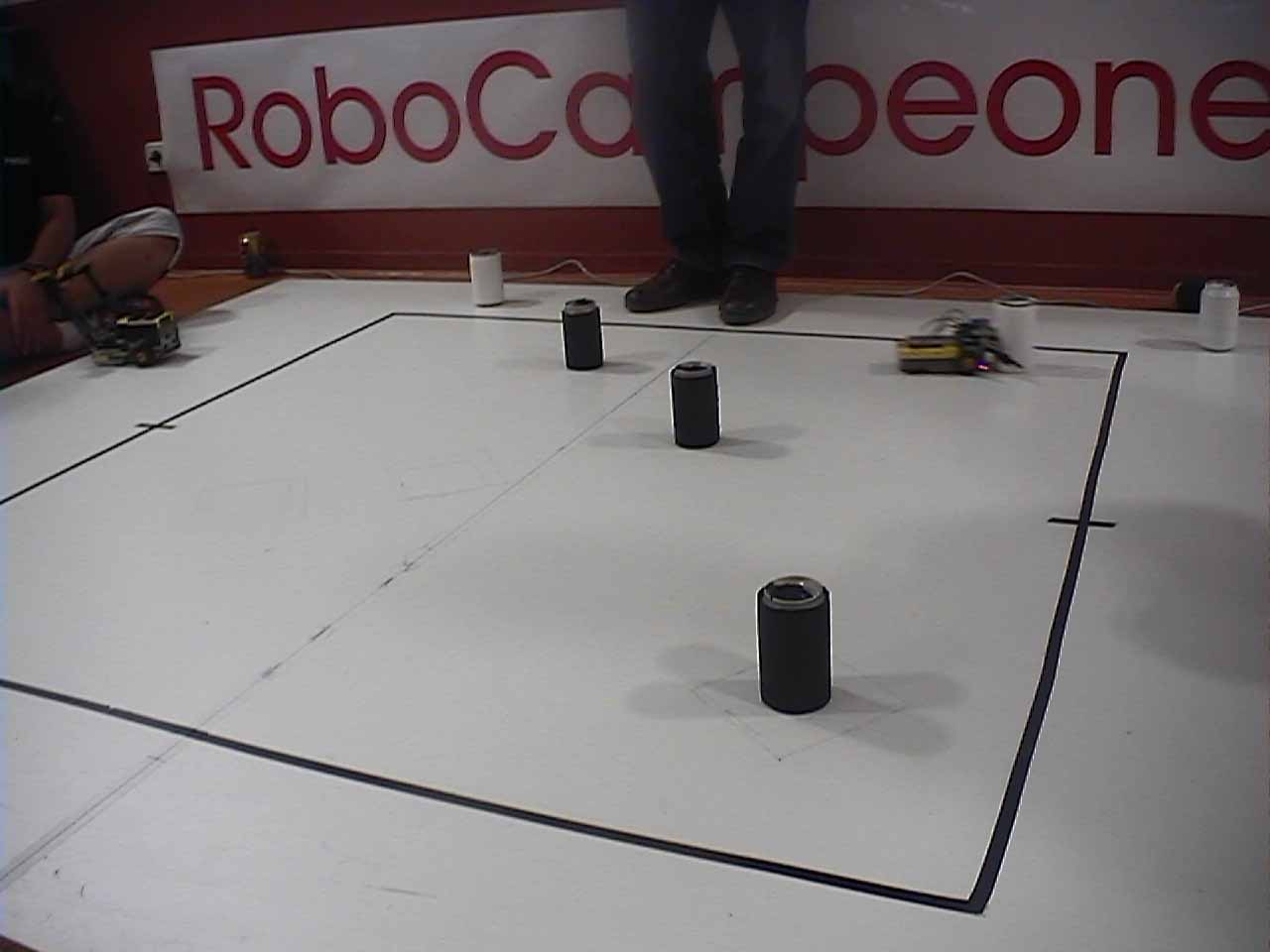
PRUEBA DE LOS LIMPIADORES DE LATASEstá prueba consistió en extraer de una superficie cuadrada de color blanco y delimitada por una línea perimetral de color negro a tres latas de un mismo color colocadas al azar. Cada equipo tenía asignado un color para las latas a extraer, unas blancas y otras negras. El equipo que antes extrajera sus latas era proclamado vencedor. La prueba debía desarrollarse en un máximo de tres minutos y los robots partían de los lados opuestos de la tarima. Si un robot sacaba una lata de un color diferente al asignado, sería descalificado. En caso de consumirse el tiempo, ganaba el equipo que hubiera extraído más latas. En la práctica, seguramente debido a la complejidad de la tarea, los robots fueron menos competitivos que en la anterior, hubo más errores a la hora de detectar la lata por su color y en algunos casos se detectó al contrincante como si fuera una lata y se le intentaba atrapar.
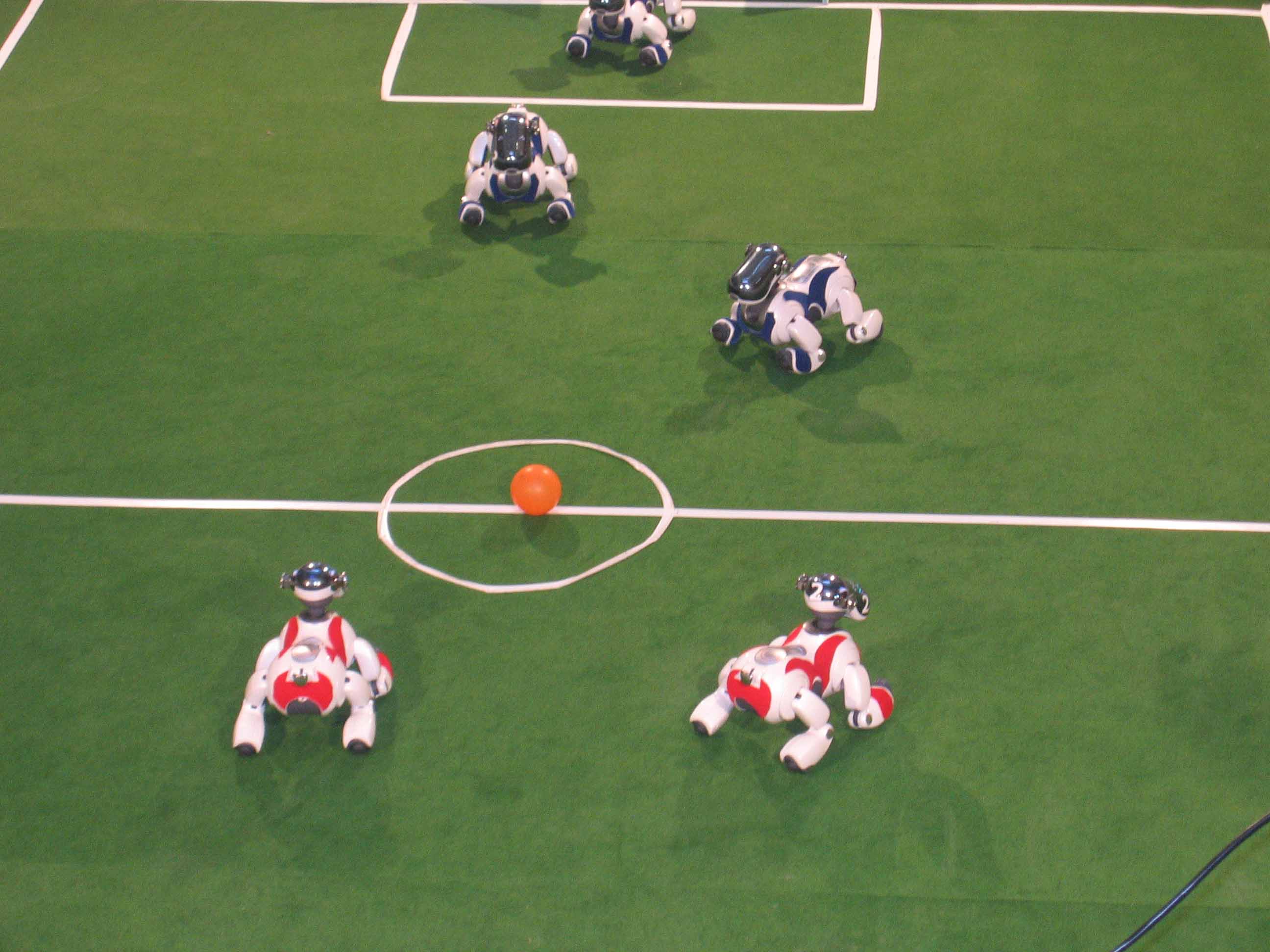
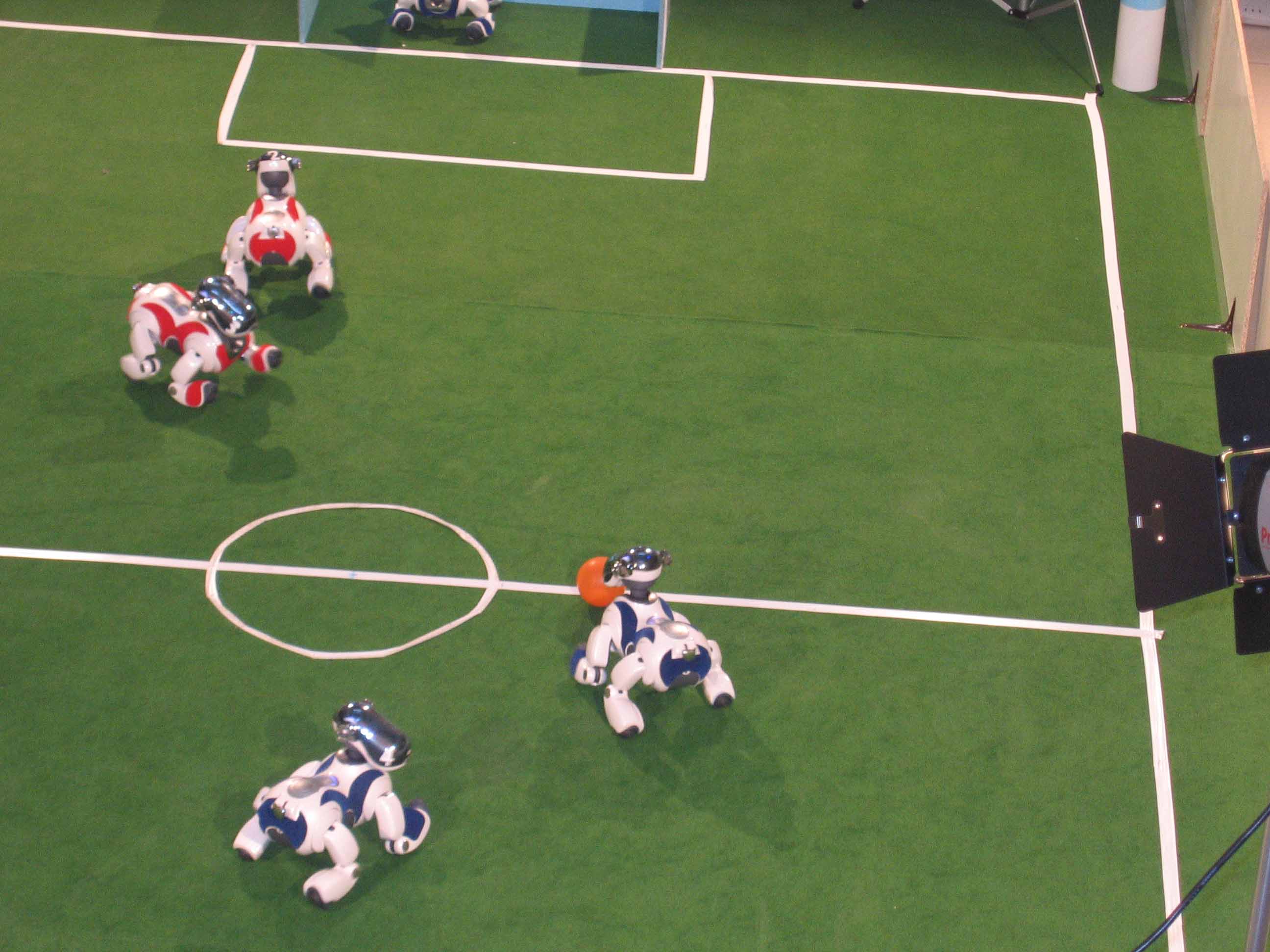
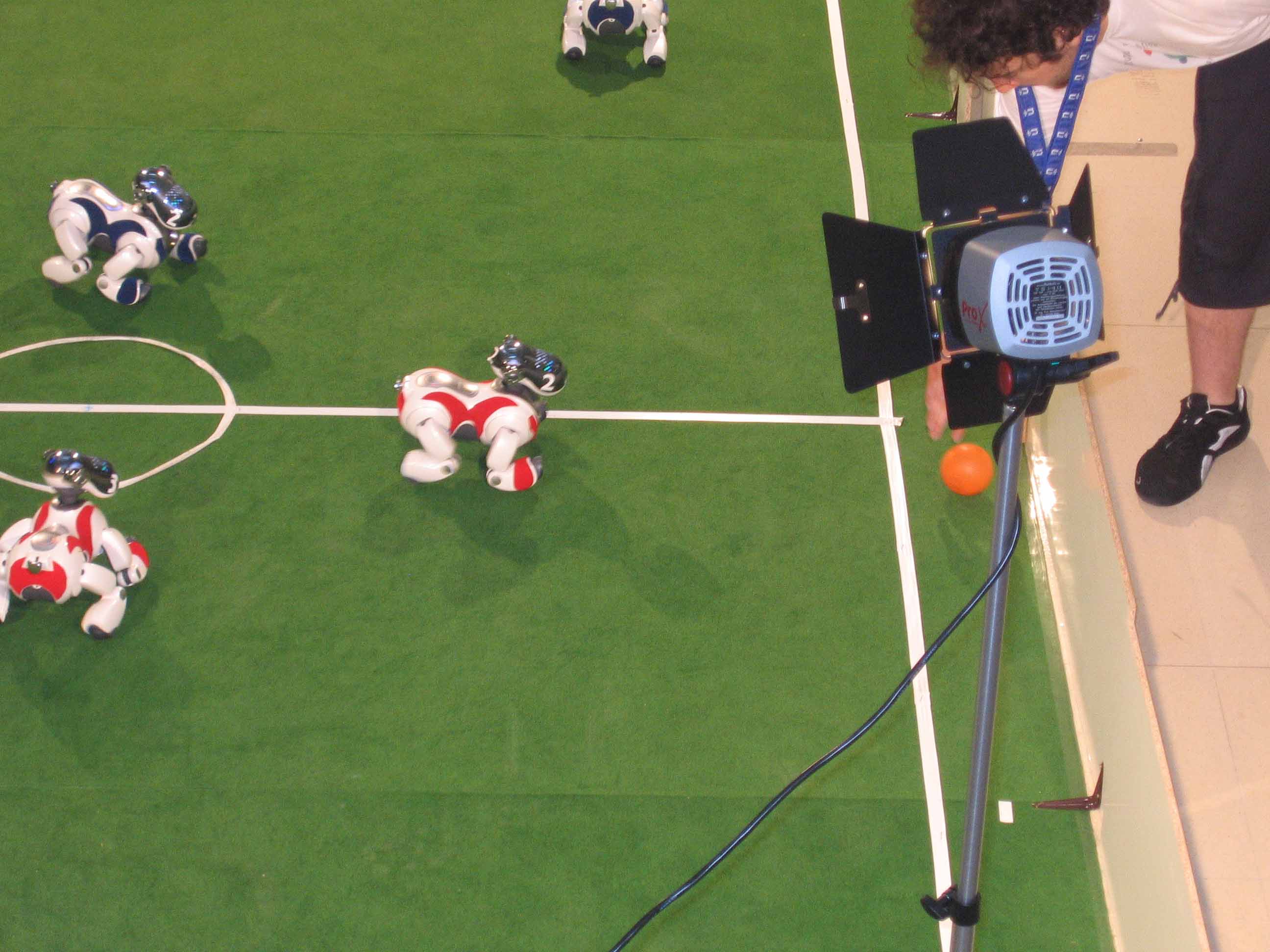
EXHIBICIONESAdemás del campeonato de robots de LEGO se desarrollaron, a distintas horas, exhibiciones de los robots-perros futbolistas Aibo de Sony de los que dispone el Grupo de Robótica de esta Universidad y cuyo comportamiento es uno de los proyectos que están siendo desarrollados por este grupo de trabajo en la actualidad. Fue la que mayor expectación e interés despertó entre el público asistente.
   PREMIOSLos premio previstos para cada centro ganador en cada prueba fueron los siguientes:
En cuanto a los alumnos que formaban parte del equipo ganador en cada prueba los premios previstos fueron:
Los ganadores en las diferentes pruebas fueron: Prueba del pañuelo
Prueba de los limpiadores de latas
ENLACES DE INTERÉS
|