| MONOGRÁFICO: ROBOT-BICHOS - ROBOT-BICHOS CABLEADOS |
 |
 |
 |
| CAJON DE SASTRE - Cajon de sastre | |||||||
| Leopoldo Mosquera Taboada-k idatzia | |||||||
| Ostirala, 2008(e)ko maiatza(r)en 02-(e)an 00:00etan | |||||||
JPAGE_CURRENT_OF_TOTAL
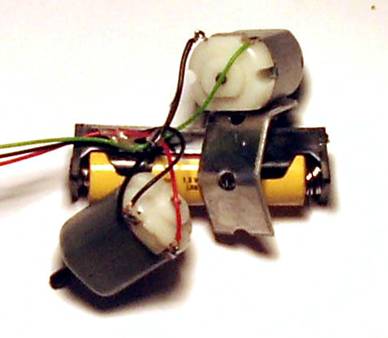
ROBOT-BICHOS CABLEADOSa)Introducción:Una forma alternativa de iniciar a los alumnos en el control eléctrico e incluso en la robótica (como se verá en próximos artículos) es construyendo un artefacto móvil de reducidas dimensiones, bajo coste y con aspecto de insecto terrestre. Podemos lograr su desplazamiento utilizando dos motores en disposición simétrica, inclinados y de modo que sus ejes apoyan directamente sobre la superficie horizontal de la mesa. Los escasos componentes mecánicos y eléctricos se disponen intencionadamente, siguiendo un criterio estético inspirado en la biología: el portapilas hace de abdomen y los motores de tórax; después podemos añadir antenas de alambre, alas de plástico, etc. En esta primera parte utilizaremos para controlar sus movimientos un mando compuesto de pulsadores o conmutadores, fabricado a propósito, y que se comunique con el robot a distancia mediante cables de colores.
b) Construcción de un robot-bichoPara la construcción del móvil necesito un trozo de perfil plano de aluminio perforado (que se puede incluso romper sin necesidad de alicates), previamente doblado en tres partes con las manos (en forma de U con los extremos inclinados), y que después pegaré sobre el dorso del portapilas utilizando la pistola termofusible. Una vez queden unidas ambas piezas, pegaré los dos motores (yo he utilizado el modelo C-6040 de cebek por tener caras planas, ser barato y arrancar con poca tensión). Las conexiones de los motores quedarán en la parte superior y sus ejes deben sobresalir lo suficiente para que móvil apenas apoye, de forma equilibrada sobre ambos, además de en algún punto del extremo contrario del portapila. En ambos ejes colocaré, a presión, un trozo de funda de plástico obtenida al pelar un cable de cobre de 1,5 ó 2 mm; con él consigo la adherencia necesaria para el desplazamiento sobre cualquier superficie no muy rugosa. c) Circuito con mando de dos conmutadores:Un robot-bicho dotado de un portapilas de 1,5 V, dos motores y la correspondiente pila, puede ser guiado conectando dichos componentes a un mando a distancia compuesto de dos conmutadores. Bastaría utilizar varios cables de colores con un máximo de dos metros (yo he utilizado cables de ratón de ordenador pelados) que, partiendo de sus conexiones en el portapilas de insectoide, esté unido en su otro extremo a los conmutadores del mando, cerrándose un circuito eléctrico de sorprendente simplicidad. Las posiciones de los conmutadores permiten su avance o retroceso en línea recta, el giro libre así como su parada. Una vez construido, debemos conectar seis cables finos de distintos colores: dos a cada motor y dos a la pila (mejor si son el rojo y el negro). El otro extremo de cada cable se dirigirá hacia los conmutadores del mando, y antes de cerrar el circuito, cabe comentar a los alumnos cómo una llave de cruce se utiliza para cambiar la polaridad de la pila en los bornes del motor, afectando al sentido de giro del mismo.
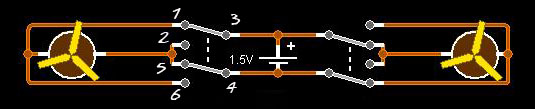
En los mandos que he construido utilizo conmutadores dobles de tres posiciones (tanto de tipo palanca como de corredera), utilizando la posición intermedia para detener el motor correspondiente. Empleo componentes comerciales en mis proyectos con los alumnos, ya que aparte de su fiabilidad, los puedo reciclar casi todos para el curso siguiente; además su utilización sirve para relacionar los proyectos de Tecnología con algunas situaciones eléctricas comunes en las viviendas (lámparas, juguetes, electrodomésticos o pequeños dispositivos electrónicos) percatándose de la utilidad de estos conocimientos. Cada conmutador tiene 6 bornes organizados en dos filas de tres, de tal modo que cada fila es independiente eléctricamente, circunstancia que aprovecharemos para poder cerrar el circuito mando-bicho de un modo fácil de explicar para los alumnos, incluso sin utilizar simbología eléctrica. A cada conmutador se llevan los dos cables de uno de los motores y se conectan en los bornes pareados de un extremo, desde los cuales se extiende el cable cruzando a los del otro extremo haciendo una equis; dicho de otro modo, estableciendo una numeración para los seis bornes, de modo que queden los tres de la izquierda con números impares y los otros tres con pares, se conectarían el nº1 con el nº6 y el nº2 con el nº5.
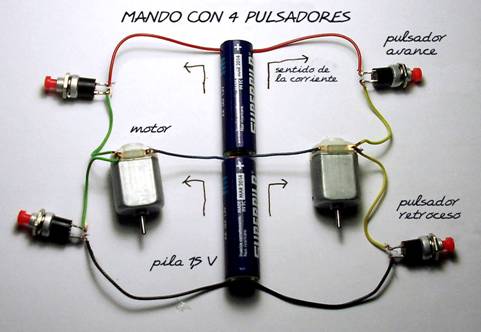
Los cables rojo y negro correspondientes a los polos de la pila se conectan en los bornes centrales de cada conmutador (números 3 y 4) y se extienden de uno a otro, ya que ambos motores de nuestro móvil comparten la pila con una disposición eléctrica en paralelo. Cerradas todas las conexiones, y antes de su posible soldadura, conviene comprobar si el insectoide se desplaza en sentido de avance o retroceso moviendo las palancas o correderas de los dos conmutadores en sintonía. Una mayor simplificación en el circuito eléctrico se lograría independizando la alimentación de los dos motores, para lo que bastaría con pegar dos portapilas de 1,5 V y llevar los cables de sus bornes hacia su conmutador correspondiente; se aumenta el número de cables entre el mando y el móvil, pero éste también aumenta su velocidad de desplazamiento, lo que agrada a los alumnos a pesar de dificultar su control. También podría hacerse el mando con llaves de cruce construidas con chapas de latón y un trozo de tablero o un listón de madera; aunque es más incómodo de manejar, permitiría un ahorro de dinero. d) Circuito con mando de cuatro (o dos) pulsadores:También podemos conseguir los movimientos anteriores utilizando cuatro pulsadores en el mando, dos para cada motor. Ahora al apretar según que pulsadores, describiremos rectas o curvas, en avance o retroceso, pudiendo ser guiado en cualquier dirección.
El circuito eléctrico que pemite el control del insectoide es de enorme simplicidad en su representación simbólica, ya que tiene el aspecto de una celosía compuesta de cuatro cuadrados con las caras pegadas: en las interiores verticales se sitúan las pilas, en las interiores horizontales los motores y en las exteriores verticales los pulsadores; aunque las pilas están conectadas entre sí, cada una suministra corriente de forma independiente y al no producirse la suma de sus tensiones o de sus corrientes, no podemos hablar de una disposición en serie. Su implementación y conexionado presenta más complicaciones, ya que hay cables que no necesitan extenderse desde el mando hasta el móvil: el que sale del punto en común de las pilas y se bifurca para contactar ambos motores (situado en la cruceta central del esquema) y los que unen los pulsadores entre sí (que son las esquinas exteriores del esquema). Ahora partirían del insectoide hacia los pulsadores, un cable desde cada motor más los correspondientes a los polos positivode la pila superior y negativo de la inferior.
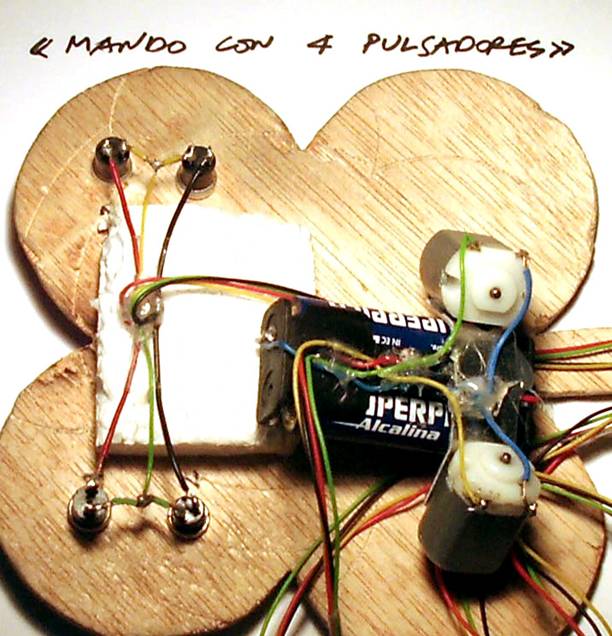
Se puede comprobar, sobre el esquema o una vez terminado el proyecto que, quitando una y otra pila, los motores seguirían funcionando, pues la idea es que la pila superior sea la que permita el avance, presionando dos pulsadores de los lados a la vez (y la inferior el retroceso presionando los otros dos). Surge así la posibilidad de plantear un proyecto más simplificado, en el que nuestro insectoide utilice un portapilas de 1,5 V y dos pulsadores en el mando, con lo que podría trazar trayectorias rectas o curvas pero sólo en el sentido de avance. Es una opción casi la mitad de económica, pero además nos permite sustituir los pulsadores por pequeños interruptores de más fácil localización en las tiendas de componentes eléctricos; también pueden fabricarse los pulsadores con chapas de hojalata, chinchetas, clips, … Otra idea es reducir el tamaño del mando de modo que baste una sola mano para sujetarlo y su dedo gordo para presionar uno o dos pulsadores a la vez.
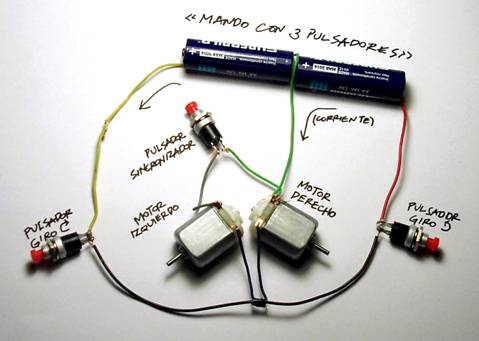
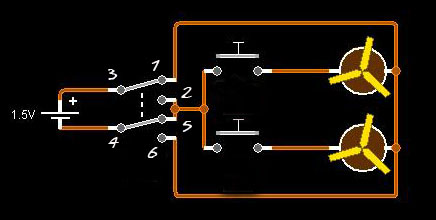
e) Circuito de mando con tres pulsadores:En el propósito de no renunciar a que nuestro bichoide avance, gire y retroceda, y añadiendo la idea de controlarlo con una sola mano, surge la posibilidad de crear un circuito de mando con tres pulsadores, que además nos permite continuar con la progresión en dificultad del análisis de los circuitos eléctricos. Como se observa en el esquema, las dos pilas están conectadas como en el proyecto anterior (son independientes, no están en disposición serie) y ambas llevan asociadas un pulsador, de manera que se logra el giro de uno de los motores, en un sentido u otro, jugando con la dirección de la corriente; el tercer pulsador sirve para sincronizar al segundo motor (conectado en paralelo) con el sentido de giro que se haya determinado para el primero. Dicho de otro modo, para el avance o el retroceso se necesita presionar dos pulsadores simultáneamente, mientras que para girar basta con pulsar uno de los dos comentados al principio, aunque sólo gire un motor. Conviene situar en el mando a los tres pulsadores muy próximos y en línea, ubicando en el medio el “sincronizador”.
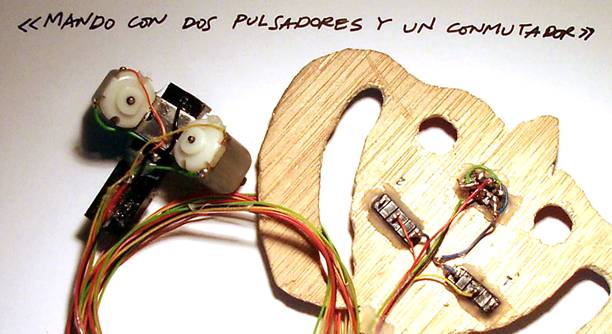
Este circuito no sólo es más complejo de entender para el alumno, también su implementación presenta mayores dificultades que en casos anteriores. Cinco son los cables que parten del mando, ya que un borne del pulsador de un extremo se une con otro del situado en el extremo contrario; este mismo cable (situado en la parte inferior de la imagen) se bifurca, sobre el portapilas, para conectarse con un borne de cada motor. f) Circuito de mando de dos pulsadores y un conmutador:Con este circuito vuelven a utilizarse tres elementos de control sobre el mando (que ahora debe manejarse con las dos manos) y se combinan aspectos del análisis de circuitos eléctricos tratados en los distintos apartados anteriores.
Para su funcionamiento se utiliza un conmutador de sólo dos posiciones para efectuar el avance o el retroceso del insectoide, siendo los pulsadores, cada uno asignado a un motor, los encargados de cerrar el circuito; la conexión en paralelo permite que compartan la corriente suministrada por la pila de 1,5 V. Los cables soldados en los bornes exteriores del conmutador se cruzan de modo similar al del circuito de mando del apartado c); uno de los cables salientes del mando va directamente a los motores conectándose a un borne de cada uno de ellos, y el otro cable es compartido por los pulsadores antes de dirigirse hacia los motores previamente pegados en el portapilas. Los cables de alimentación de éste también se conectan en los bornes intermedios del conmutador, por lo que sólo se necesitan cinco cables entre el mando y el insectoide.
g) ConclusiónLa realización del conjunto de actividades propuestas en este artículo demuestra que, con unos pocos conocimientos y medios materiales, cualquiera puede proponer a sus alumnos de cualquier nivel, construir un artefacto móvil con el que disfrutarán del área de Tecnología y que les servirá para entender de un modo atractivo el funcionamiento de los circuitos eléctricos elementales. |