| MONOGRÁFICO: Controlabot - Controlabot (6) |
 |
 |
 |
| EQUIPAMIENTO TECNOLÓGICO - Didáctica de la tecnología | |||||||||
| diumenge, 1 de novembre de 2009 00:00 | |||||||||
Pàgina 6 de 7
CONTROLABOT (6)
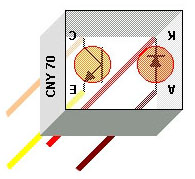
IntroducciónEn este capítulo del monográfico pondremos en funcionamiento un dispositivo móvil y se demostrará que, con una sencilla programación y los sensores correspondientes podrá seguir una trayectoria de líneas negras sobre fondo blanco (o viceversa). Programación de un siguelíneasUn dispositivo muy utilizado en robótica es el denominado CNY70. Se trata de un sensor óptico reflexivo, de construcción compacta, donde un emisor de infrarrojos y un receptor (fototransistor) se colocan en paralelo; se emplea comúnmente para detectar la presencia de una línea negra utilizando la reflexión de la luz infrarroja sobre la superficie (normalmente blanca) en que se sitúe dicha línea. El CNY70 tiene cuatro pines de conexión que se corresponden, por un lado, con el emisor y colector del transistor y, por otro, con el ánodo y el cátodo del diodo emisor; visto el componente desde su cara útil y con el texto a la izquierda, los pines se ordenarían como se ve en la imagen inferior:
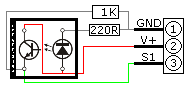
El circuito que debe configurarse es el de la derecha: colector y ánodo se conectan a un borne positivo (de 6V en nuestro caso), mientras que emisor y cátodo lo harían al borne negativo, pero no sin antes soldar una resistencia de 220 ohmios al cátodo y un pequeño potenciómetro de 1 K al emisor (regulando su valor podré ajustar la sensibilidad del dispositivo en función de la luz ambiente). Por último, debe soldarse directamente a la patilla del emisor, el cable que envía al puerto paralelo la señal de entrada que se crea al pasar de blanco a negro (o viceversa) frente al sensor óptico: el circuito entrega al puerto un nivel de voltaje bajo cuando no refleja el haz infrarrojo y un nivel alto cuando encuentra un material sobre el que lo refleja.
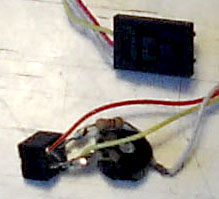
Si escogemos un CNY70 y le damos la vuelta, doblaremos con cuidado la patilla del colector (C) hasta unirla con la del ánodo (A) y después separaremos un poco las tres patillas; por otro lado, soldaremos una resistencia de 220 ohm al común del potenciómetro. Antes de soldar los tres cables que vienen del conector, similar al utilizado para el sensor con finales de carrera, uniremos la resistencia a la patilla del cátodo (K) y el potenciómetro a la del emisor (E) (en la imagen el blanco va a masa, el rojo al borne positivo de la pila y el amarillo al pin de entrada del conector paralelo). Utilizaré para sujetar el sensor completo un perfil de aluminio perforado de 4 cm de largo, en el que doblaré, con un ángulo de 90º, medio centímetro de longitud en uno de sus extremos; éste lo apoyaré y pegaré con la pistola termofusible sobre la tabla del robot, en su parte frontal. El CNY70 lo sujetaré al otro extremo del perfil pegándolo de modo que se distancie apenas 1 mm de la superficie lisa sobre la que se apoyarán las ruedas del móvil, ya que de no ser así,el dispositivo perderá efectividad.
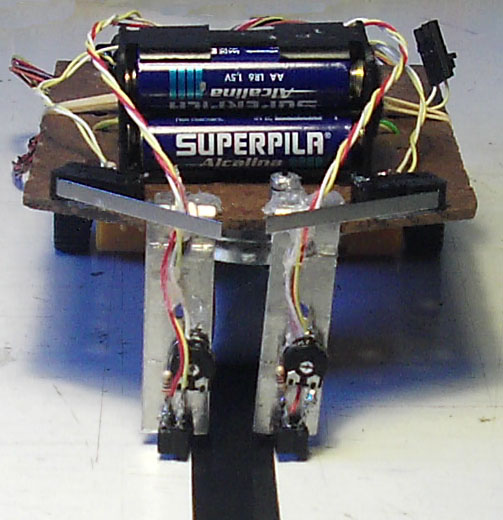
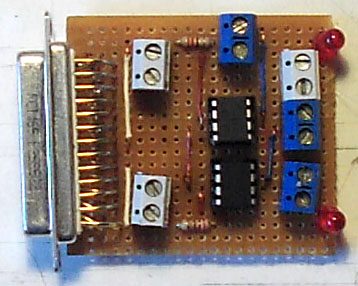
La separación recomendable entre los dos perfiles de aluminio será de dos centímetros y en la programación tendremos 4 combinaciones: el sensor derecho sobre negro y el otro sobre blanco, el derecho sobre blanco y el otro sobre negro, los dos sobre blanco y los dos sobre negro. En los dos primeros casos, el vehículo reaccionará girando al lado contrario, mientras que si son iguales las lecturas, se decidirá si avanza recto o se detiene. PARA LINEANEGRA SI ((LEEPUERTO 889) = 72) [ESCRIBEPUERTO 888 5] SI ((LEEPUERTO 889) = 104) [ ESCRIBEPUERTO 888 9] SI ((LEEPUERTO 889) = 88) [ ESCRIBEPUERTO 888 6 ] SI ((LEEPUERTO 889) = 120) [ESCRIBEPUERTO 888 0 ] LINEANEGRA FIN A partir de este procedimiento básico podremos crear programas más largos en los que, por ejemplo, el móvil llegue a un punto final en su recorrido, se detenga, gire media vuelta y realice la trayectoria en sentido inverso, etc. Proyecto final de tarjeta ControlaBotAntes de terminar este monográfico quiero mostrar la posibilidad de trabajar con una tarjeta que puede servir para programar aplicaciones robóticas más completas, ya que permiten simultanear el uso de varios sensores a la vez, utilizando regletas para conectar los cables a la placa utilizando un destornillador. Además, utiliza un conector hembra para cable paralelo estándar, por lo que una vez construida, puede ser usada más cómodamente por distintos usuarios y con cables antiguos para impresoras; por último, incorpora dos diodos led que pueden ser utilizados para indicar la activación de los motores, la detección por parte de los sensores o simplemente para crear intermitencias luminosas. Como ya expliqué en el capítulo 3, sólo necesito una de las líneas (pin 2 al 13) del conector junto con el pin 25 de masa y el pin 15 de la línea inferior (ligeramente doblados para que al pincharlos sobre la placa perforada no se alineen con los anteriores); utilizaré como base una placa para prototipos de fibra de vidrio, con topos distanciados 2,54 mm, y de dimensiones 6 x 5 cm.
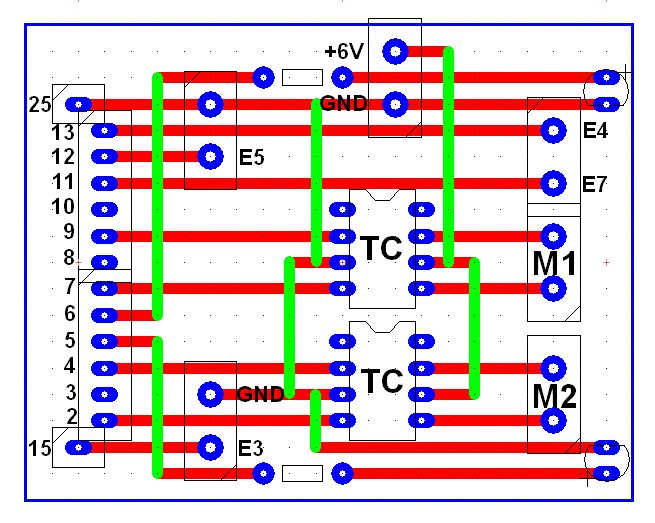
Una vez recortada la placa con sus medidas, soldaré el conector acodado en un extremo, dejando al menos dos pistas libres a un lado y una pista libre al otro, ya que las utilizaremos posteriormente. Para entender mejor esta idea ,y visualizar la placa en su conjunto, debe observarse el esquema. Entre el conector paralelo y los drivers hay que dejar un espacio de 0,5 cm, ya que lo necesitamos para realizar las conexiones en la superficie de la placa que nos permitirán utilizar los pines de datos 5 y 6 para encender el par de leds (con una resistencia intercalada en su circuito) trasladando la señal del puerto a dos pistas del exterior de la placa (también se podrían obviar y simplificar así el esquema). A continuación de dichos cables, situaremos dos regletas dobles para circuito impreso alineadas con los pines extremos del conector (el superior con el 25 y el inferior con el 15); el resultado nos proporciona dos entradas para sensores completas, pues ambas incorporan la conexión a masa en la patilla superior.
A una distancia mínima horizontal de un centímetro, estarán situados los drivers y su regleta de alimentación (donde se introducirán después los cables del portapilas). Como se observa en la imagen, el driver superior alineará su patilla deshabilitada con el pin 10 del conector, por lo que será controlado en su funcionamiento por los pines de datos 9 y 7; justo debajo, con la mínima separación, se colocará el segundo driver, de modo que será controlado desde el puerto paralelo a través de los pines de datos 2 y 4. Otra regleta de circuito impreso se situará con su patilla inferior alineada con el pin 25 del conector, quedando la patilla superior de éste convertida (una vez conectada la pila) en el punto de referencia de tensión 6 V.
En el hueco de pistas que ha quedado a la izquierda, entre los conectores de las entradas y los drivers, situaremos tres cables en superficie que unan las patillas de los elementos del circuito que deben conectarse a masa (pin 25 del conector, patillas GND a la izquierda de los drivers y posible polo negativo para el diodo led inferior); del mismo modo procederemos en el lado derecho de los drivers para alimentar sus patillas de polaridad positiva. Todos los cables superficiales se indican en color verde en el esquema y los he realizado con hilo fino y rígido de cobre, extraído de un cable de red de ordenador. A continuación alinearemos tres regletas de conexiones: dos para los motores (en línea con las patillas de salida de cada driver) y una para conectar dos entradas a los pines 13 y 11 (y que necesitarán del conector del portapilas para su uso con determinados sensores, como ya explicaré en el capítulo 7).
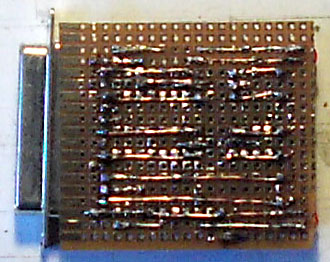
Las conexiones en la parte inferior de la placa (líneas en rojo del esquema), las he resuelto también con hilo de cobre de cable de red pelado y soldado en sus extremos, coincidiendo con las patillas verticales de los elementos del anverso de la placa; cuando la pista de conexión es muy alargada, he soldado el cable en alguno de los topos intermedios, y cuando era muy corta, sencillamente he creado una pista con el estaño de soldar, intentando no acumularlo. ConclusiónDado que en esta tarjeta ControlaBot la disposición de los pines del conector, con respecto a los drivers y las regletas de entrada, es distinta a la que habíamos determinado con la primera tarjeta diseñada en el capítulo anterior, deberemos adaptar la programación hasta ahora conocida (cambiando sus números decimales de entradas y salidas), pero no sin antes probarla con nuevos dispositivos sensores.
|