| MONOGRAFICO: Lenguajes de programación - Principios básicos de PLC |
 |
 |
 |
| Monográficos - Monográficos |
| Écrit par Paloma Prieto |
| Lundi, 08 Octobre 2007 10:02 |
|
Page 3 sur 4
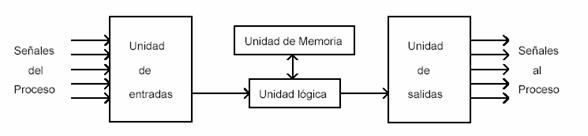
Principios Básicos de los PLC1. Principios BásicosCon la llegada de los autómatas programables, los llamados PLC, la industria sufrió un impulso importante, que ha facilitado de forma notable que los procesos de producción o control se hayan flexibilizado mucho. Encontramos PLC en la industria, pero también en nuestras casas, en los centros comerciales, hospitalarios, etc. También en nuestras escuelas de formación profesional encontramos frecuentemente autómatas programables. PLC son las siglas en inglés de Controlador Lógico Programable (Programmable Logic Controller). Cuando se inventaron, comenzaron llamándose PC (Controlador programable), pero con la llegada de los ordenadores personales de IBM, cambió su nombre a PLC (No hay nada que una buena campaña de marketing no pueda conseguir). En Europa les llamamos autómatas programables. Sin embargo, la definición más apropiada sería: Sistema Industrial de Control Automático que trabaja bajo una secuencia almacenada en memoria, de instrucciones lógicas. 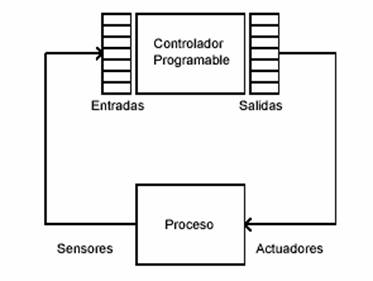 1.1¿Qué es un PLC?El PLC es un dispositivo de estado sólido, diseñado para controlar procesos secuenciales (una etapa después de la otra) que se ejecutan en un ambiente industrial. Es decir, que van asociados a la maquinaria que desarrolla procesos de producción y controlan su trabajo. Como puedes deducir de la definición, el PLC es un sistema, porque contiene todo lo necesario para operar, y es industrial, por tener todos los registros necesarios para operar en los ambientes hostiles que se encuentran en la industria. 1.2 ¿Qué hace un PLC?Un PLC realiza, entre otras, las siguientes funciones:
Los PLC se distinguen de otros controladores automáticos, en que pueden ser programados para controlar cualquier tipo de máquina, a diferencia de otros controladores (como por ejemplo un programador o control de la llama de una caldera) que, solamente, pueden controlar un tipo específico de aparato. Además de poder ser programados, son automáticos, es decir son aparatos que comparan las señales emitidas por la máquina controlada y toman decisiones en base a las instrucciones programadas, para mantener estable la operación de dicha máquina. Puedes modificar las instrucciones almacenadas en memoria, además de monitorizarlas.  2 Un poco de historia
Cuando se empezaron a usar los relés en el control de procesos productivos, se comenzó a añadir lógica a la operación de las máquinas y así se redujo e incluso se eliminó la carga de trabajo del operador humano. Los relés permitieron establecer automáticamente una secuencia de operaciones, programar tiempos de retardo, contar las veces que se producía un suceso o realizar una tarea en dependencia de que ocurrieran otras. Los relés sin embargo, tienen sus limitaciones: Tienen un tiempo limitado de vida, debido a que sus partes mecánicas están sometidas a desgaste, los conductores de corriente pueden quemarse o fundirse, y con ello puede provocarse una avería y tendrán que ser reemplazados. Desde el punto de vista de la programación, su inconveniente mayor era que la estructura de programación era fija. El panel de relés lo configuraban los ingenieros de diseño. Luego se construía y se cableaba. Cuando cambiaban las necesidades de producción había que construir un panel nuevo. No se podía modificar, al menos sin un coste excesivo en tiempo y mano de obra.
Una aplicación típica de estos sistemas utilizaba un panel de 300 a 500 relés y miles de conexiones por cable, lo que suponía un coste muy elevado en instalación y mantenimiento del sistema (aproximadamente de 25 a 45 euros por relé). En aquella época, al entrar en una sala de control, era habitual oír el clic continuo de los relés al abrirse y cerrarse.
Muchos de ellos usaban microprocesadores, pero al programarse en un lenguaje extraño a los ingenieros de control (el assembler, observa la figura de la izquierda), el mantenimiento era muy complejo. La existencia de ordenadores en el momento del desarrollo de los PLC fue lo que inspiró su concepto: Había que diseñar un artefacto que, como una computadora, pudiese efectuar el control y pudiese ser re-programada, pero pudiera soportar el ambiente industrial. Los primeros controladores completamente programables fueron desarrollados en 1968 por una empresa de consultores en ingeniería (Bedford y Asociados), que luego se llamó MODICOM.
Así el primer PLC fue construido en 1969 por encargo de General Motors Hydramatic Division (fábrica de transmisiones para los vehículos de la General Motors). Este PLC se diseñó como un sistema de control con un computador dedicado para controlar una parte de la cadena de producción y sustituir los sistemas de cableado que usaban hasta la fecha, que resultaban difíciles de modificar, cada vez que se requerían cambios en la producción.
Con estos controladores primitivos era posible:
Los primeros PLC incorporaban sólo un procesador para programas sencillos y algunos dispositivos de entrada / salida. Posteriormente han ido desarrollándose hasta los equipos actuales, que ya integran:
3 Ventajas y desventajas de los PLC3.1 VentajasLas ventajas de los PLC son las siguientes:
· No es necesario dibujar el esquema de contactos. · No es necesario simplificar las ecuaciones lógicas ya que, por lo general, la capacidad de almacenamiento del modulo de memoria es lo suficientemente grande como para almacenarlas. · La lista de materiales a emplear es mas reducida y, al elaborar el presupuesto correspondiente, se elimina parte del problema que supone el contar con diferentes proveedores, distintos plazos de entrega, etc.
3.2 Inconvenientes
4 ¿Cómo funciona el PLC?
Una vez que se pone en marcha, el procesador realiza una serie de tareas según el siguiente orden: a) Al encender el procesador ejecuta un auto-chequeo de encendido y bloquea las salidas. A continuación, si el chequeo ha resultado correcto, el PLC entra en el modo de operación normal. b) El siguiente paso lee el estado de las entradas y las almacena en una zona de la memoria que se llama tabla de imagen de entradas (hablaremos de ella mas adelante). c) En base a su programa de control, el PLC actualiza una zona de la memoria llamada tabla de imagen de salida. d) A continuación el procesador actualiza el estado de las salidas "copiando" hacia los módulos de salida el estado de la tabla de imagen de salidas (de este modo se controla el estado de los módulos de salida del PLC, relay, triacs, etc.). e) Vuelve a ejecutar el paso b) Cada ciclo de ejecución se llama ciclo de barrido (scan), el cual normalmente se divide en:
4.1 Otras funciones adicionales del PLCa) En cada ciclo del programa, el PLC efectúa un chequeo del funcionamiento del sistema reportando el resultado en la memoria, que puede ser comprobada por el programa del usuario. b) El PLC puede controlar el estado de las Inicializaciones de los elementos del sistema: cada inicio de un microprocesador también se comunica a la memoria del PLC. c) Guarda los estados de las entradas y salidas en memoria: Le puedes indicar al PLC el estado que deseas que presenten las salidas o las variables internas, en el caso de que se produzca un fallo o una falta de energía en el equipo. Esta funcionalidad es esencial cuando se quieren proteger los datos de salida del proceso. d) Capacidad modular: Gracias a la utilización de Microprocesadores, puedes expandir los sistemas PLC usando módulos de expansión, en función de lo que te requiera el crecimiento de tu sistema. Puede expandirse a través de entradas y salidas digitales, análogas, etc., así como también con unidades remotas y de comunicación. 5 ¿Cómo se clasifican los PLC?Los PLC pueden clasificarse, en función de sus características en: 5.1 PLC Nano:Generalmente es un PLC de tipo compacto (es decir, que integra la fuente de alimentación, la CPU y las entradas y salidas) que puede manejar un conjunto reducido de entradas y salidas, generalmente en un número inferior a 100. Este PLC permite manejar entradas y salidas digitales y algunos módulos especiales. 5.2 PLC CompactoEstos PLC tienen incorporada la fuente de alimentación, su CPU y los módulos de entrada y salida en un solo módulo principal y permiten manejar desde unas pocas entradas y salidas hasta varios cientos (alrededor de 500 entradas y salidas), su tamaño es superior a los PLC tipo Nano y soportan una gran variedad de módulos especiales, tales como:
5.3 PLC Modular:Estos PLC se componen de un conjunto de elementos que conforman el controlador final. Estos son:
De estos tipos de PLC existen desde los denominados Micro-PLC que soportan gran cantidad de entradas y salida, hasta los PLC de grandes prestaciones que permiten manejar miles de entradas y salidas.
|

 Hacia 1970 surgieron los sistemas lógicos digitales construidos mediante circuitos integrados, aunque eran productos diseñados para una aplicación específica y no eran controladores genéricos. ¡Un paso es un paso!
Hacia 1970 surgieron los sistemas lógicos digitales construidos mediante circuitos integrados, aunque eran productos diseñados para una aplicación específica y no eran controladores genéricos. ¡Un paso es un paso!