| INICIACION A LA ROBOTICA (4) Control de máquinas con células LDR en pantalla II |
 |
 |
 |
| EQUIPAMIENTO TECNOLÓGICO - Robótica |
| Written by Ángel Oeo |
| Monday, 01 December 2003 01:09 |
|
There are no translations available.
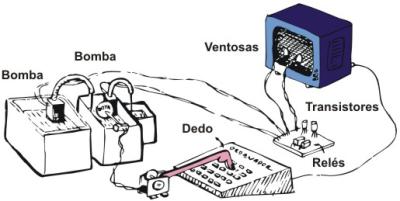
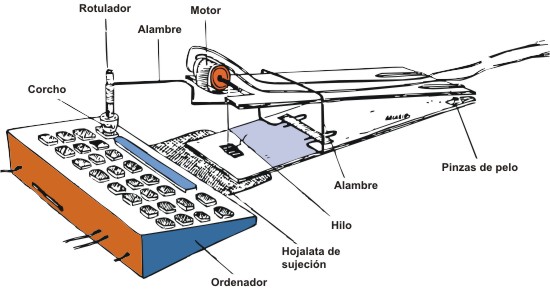
En ocasiones las máquinas pueden tener "sensores" que dan información al ordenador para que éste controle a la máquina de una manera u otra. En esta segunda para de esta forma de "control" ideada por el profesor de la UNED D. Ramón Gonzalo, vamos a presentar los dispositivos que informan al ordenador. También seguiremos viendo cómo programa todo en lenguaje LOGO. Y, por último, algunos ejemplos de máquinas ideadas por profesores. Dispositivo de "entrada" que proporciona información al ordenador. Una vez conocidos nuestros "sensores" de salida, células LDR en pantalla o "ventosas" como suelen llamarlas los niños, los dispositivos a los que nos referimos no pueden ser otros que "los dedos"
Al producirse en la máquina un determinado efecto (se cierra o abre un interruptor por contacto, luz, toque en el extremo de un recorrido... etc) se cierra el contacto que pone en marcha al motorcillo encargado de accionar "el dedo". Este naturalmente pulsa una tecla en el ordenador. Mediante un programa que "espera" esta pulsación, el mismo programa reacciona de la forma esperada. Programas de "control " en WinLogo Utilizaremos para nuestro propósito (controlarel dedo de entrada) dos nuevas primitivas: Vamos a ver un ejemplo de programa que enciende un punto de luz en uno u otro lado de la pantalla según la tecla que pulsemos. Con esto será muy facil elaborar un programa propio en el que una tecla del ordenador es pulsada. Recordemos que en el programa del artículo anterior habíamos definido RECTANBLANCO y RECTANNEGRO que ahora utilizaremos.
*** Como se puede observar la única diferencia entre PUNTODERECHO Y PUNTOIZQUIERDO es la coordenada de pantalla (x , -x) donde se dibuja. "Veces, encendido y apagado son los valores numéricos que queramos.
Este sencillo programa merece alguna explicación adicional. En principio lee un carácter por pantalla y lo almacena en la variable "TECLA". Si la tecla pulsada es la "Q" BorraPantalla y pinta el punto izquierdo. Si la tecla pulsada es la "P" BorraPantalla y pinta el punto derecho. Si la tecla pulsada es la "M" solo borra la pantalla. Lo más interesante del programa es el uso de la recursividad., ya que volvemos a llamar al mismo procedimiento para que se ejecute indefinidamente hasta que pulsemos Esc Ejemplos de máquinas controladas por ordenador realizadas por profesores y alumnos. Con un único punto de luz Veamos en primer lugar algunos ejemplos de máquinas sencillas, en las que el uso del ordenador se justifica por tratarse de "tiempos críticos" necesarios para su correcto funcionamiento
Las fotografías que se muestran a continuación fueron tomadas durante un curso de "Iniciación a la Robótica" impartido por el CAP de Collado Villalba en Marzo de 2003.
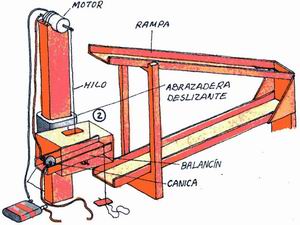
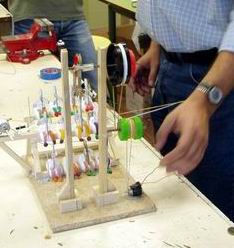
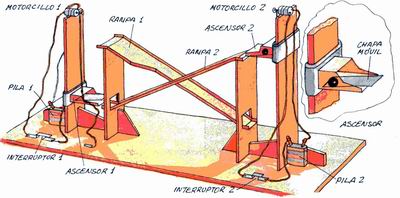
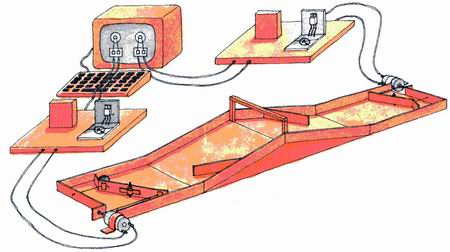
Con dos puntos de luz Dos ejemplos de dos máquinas sencillas con solo dos puntos de control. El empleo del ordenador está justificado por los tiempos críticos de programación necesarios, en el primer ejemplo para coordinar la subida y bajada de los dos ascensores de bola y en el segundo para que realmente "juegue" sola sin colarse la canica cuando el brazo esté extendido indebidamente
Al pulsar en el interruptor1, sube el ascensor1 que suelta la canica y va a parar al ascensor 2. Pulsamos en el interruptor 2 y sube el otro ascensor volviendo a depositar la canica que va a parar al ascensor 1
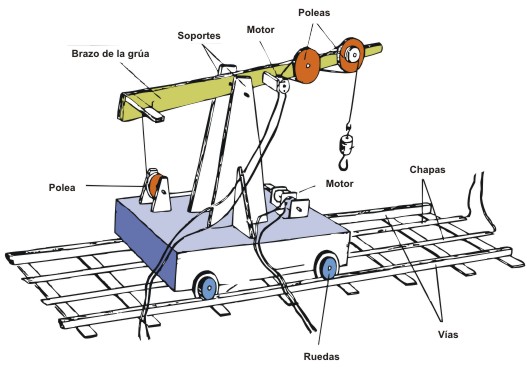
Con varios puntos de luz Esta "grúa" realizada en Burgos (1987) En las Iªs Jornadas de Educación Tecnológica (Publicado por el MEC) por un grupo de profesores tiene los siguientes "puntos de control".
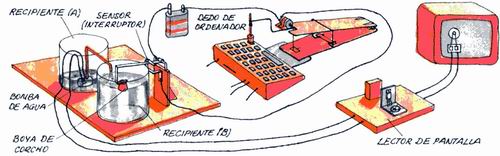
Con "retorno" al ordenador obligatorio (dedo) En este caso el motor de la bomba de agua está funcionando hasta que el "sensor" boya pone en marcha el "dedo" quien hace detener al ordenador mediante el programa correspondiente (Ejemplo del mismo en el párrafo anterior sobre WinLogo)
|