| MONOGRÁFICO: ROBOT-BICHOS |
 |
 |
 |
| CAJON DE SASTRE - Cajon de sastre | |||||||
| Écrit par Leopoldo Mosquera Taboada | |||||||
| Vendredi, 02 Mai 2008 00:00 | |||||||
There are no translations available. Una forma alternativa de iniciar a los alumnos en el control eléctrico e incluso en la robótica (como se verá a lo largo de este monográfico) es construyendo un artefacto móvil de reducidas dimensiones, bajo coste y con aspecto de insecto terrestre... ROBOT-BICHOS CABLEADOSa)Introducción:Una forma alternativa de iniciar a los alumnos en el control eléctrico e incluso en la robótica (como se verá en próximos artículos) es construyendo un artefacto móvil de reducidas dimensiones, bajo coste y con aspecto de insecto terrestre. Podemos lograr su desplazamiento utilizando dos motores en disposición simétrica, inclinados y de modo que sus ejes apoyan directamente sobre la superficie horizontal de la mesa. Los escasos componentes mecánicos y eléctricos se disponen intencionadamente, siguiendo un criterio estético inspirado en la biología: el portapilas hace de abdomen y los motores de tórax; después podemos añadir antenas de alambre, alas de plástico, etc. En esta primera parte utilizaremos para controlar sus movimientos un mando compuesto de pulsadores o conmutadores, fabricado a propósito, y que se comunique con el robot a distancia mediante cables de colores.
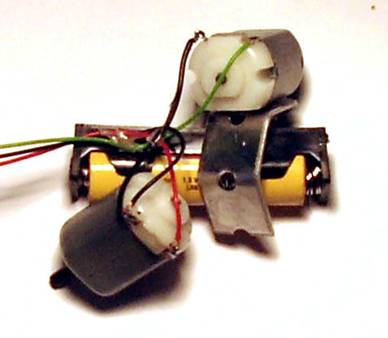
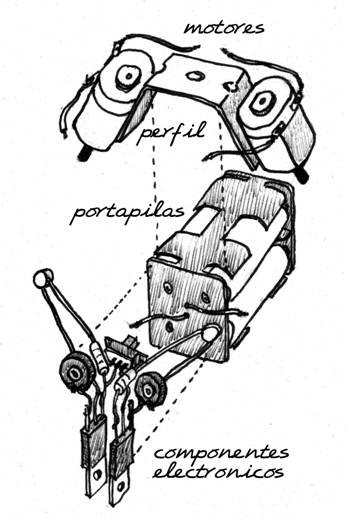
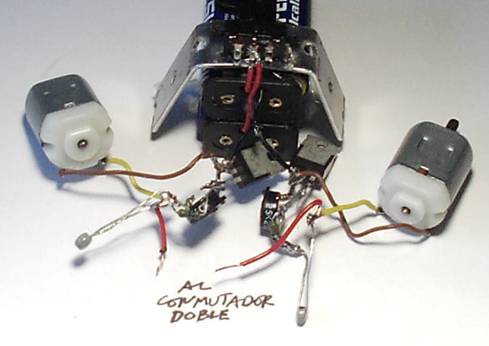
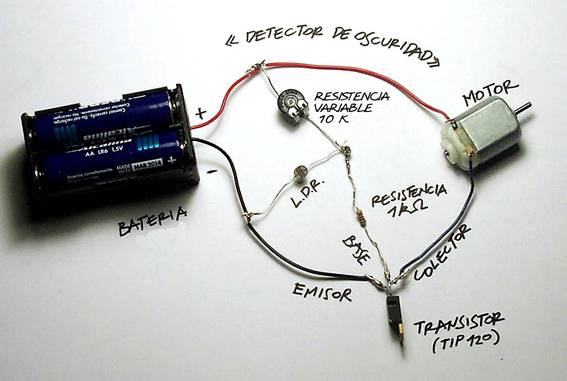
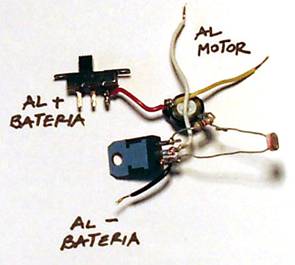
b) Construcción de un robot-bichoPara la construcción del móvil necesito un trozo de perfil plano de aluminio perforado (que se puede incluso romper sin necesidad de alicates), previamente doblado en tres partes con las manos (en forma de U con los extremos inclinados), y que después pegaré sobre el dorso del portapilas utilizando la pistola termofusible. Una vez queden unidas ambas piezas, pegaré los dos motores (yo he utilizado el modelo C-6040 de cebek por tener caras planas, ser barato y arrancar con poca tensión). Las conexiones de los motores quedarán en la parte superior y sus ejes deben sobresalir lo suficiente para que móvil apenas apoye, de forma equilibrada sobre ambos, además de en algún punto del extremo contrario del portapila. En ambos ejes colocaré, a presión, un trozo de funda de plástico obtenida al pelar un cable de cobre de 1,5 ó 2 mm; con él consigo la adherencia necesaria para el desplazamiento sobre cualquier superficie no muy rugosa. c) Circuito con mando de dos conmutadores:Un robot-bicho dotado de un portapilas de 1,5 V, dos motores y la correspondiente pila, puede ser guiado conectando dichos componentes a un mando a distancia compuesto de dos conmutadores. Bastaría utilizar varios cables de colores con un máximo de dos metros (yo he utilizado cables de ratón de ordenador pelados) que, partiendo de sus conexiones en el portapilas de insectoide, esté unido en su otro extremo a los conmutadores del mando, cerrándose un circuito eléctrico de sorprendente simplicidad. Las posiciones de los conmutadores permiten su avance o retroceso en línea recta, el giro libre así como su parada. Una vez construido, debemos conectar seis cables finos de distintos colores: dos a cada motor y dos a la pila (mejor si son el rojo y el negro). El otro extremo de cada cable se dirigirá hacia los conmutadores del mando, y antes de cerrar el circuito, cabe comentar a los alumnos cómo una llave de cruce se utiliza para cambiar la polaridad de la pila en los bornes del motor, afectando al sentido de giro del mismo.
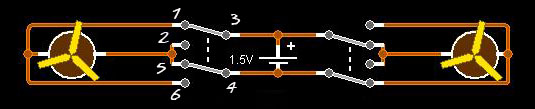
En los mandos que he construido utilizo conmutadores dobles de tres posiciones (tanto de tipo palanca como de corredera), utilizando la posición intermedia para detener el motor correspondiente. Empleo componentes comerciales en mis proyectos con los alumnos, ya que aparte de su fiabilidad, los puedo reciclar casi todos para el curso siguiente; además su utilización sirve para relacionar los proyectos de Tecnología con algunas situaciones eléctricas comunes en las viviendas (lámparas, juguetes, electrodomésticos o pequeños dispositivos electrónicos) percatándose de la utilidad de estos conocimientos. Cada conmutador tiene 6 bornes organizados en dos filas de tres, de tal modo que cada fila es independiente eléctricamente, circunstancia que aprovecharemos para poder cerrar el circuito mando-bicho de un modo fácil de explicar para los alumnos, incluso sin utilizar simbología eléctrica. A cada conmutador se llevan los dos cables de uno de los motores y se conectan en los bornes pareados de un extremo, desde los cuales se extiende el cable cruzando a los del otro extremo haciendo una equis; dicho de otro modo, estableciendo una numeración para los seis bornes, de modo que queden los tres de la izquierda con números impares y los otros tres con pares, se conectarían el nº1 con el nº6 y el nº2 con el nº5.
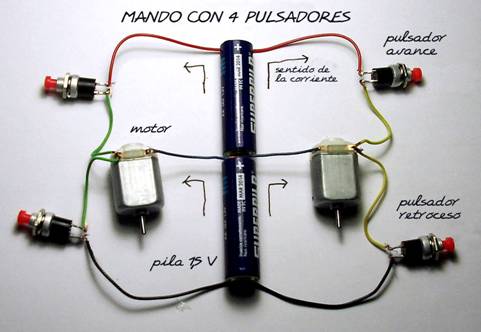
Los cables rojo y negro correspondientes a los polos de la pila se conectan en los bornes centrales de cada conmutador (números 3 y 4) y se extienden de uno a otro, ya que ambos motores de nuestro móvil comparten la pila con una disposición eléctrica en paralelo. Cerradas todas las conexiones, y antes de su posible soldadura, conviene comprobar si el insectoide se desplaza en sentido de avance o retroceso moviendo las palancas o correderas de los dos conmutadores en sintonía. Una mayor simplificación en el circuito eléctrico se lograría independizando la alimentación de los dos motores, para lo que bastaría con pegar dos portapilas de 1,5 V y llevar los cables de sus bornes hacia su conmutador correspondiente; se aumenta el número de cables entre el mando y el móvil, pero éste también aumenta su velocidad de desplazamiento, lo que agrada a los alumnos a pesar de dificultar su control. También podría hacerse el mando con llaves de cruce construidas con chapas de latón y un trozo de tablero o un listón de madera; aunque es más incómodo de manejar, permitiría un ahorro de dinero. d) Circuito con mando de cuatro (o dos) pulsadores:También podemos conseguir los movimientos anteriores utilizando cuatro pulsadores en el mando, dos para cada motor. Ahora al apretar según que pulsadores, describiremos rectas o curvas, en avance o retroceso, pudiendo ser guiado en cualquier dirección.
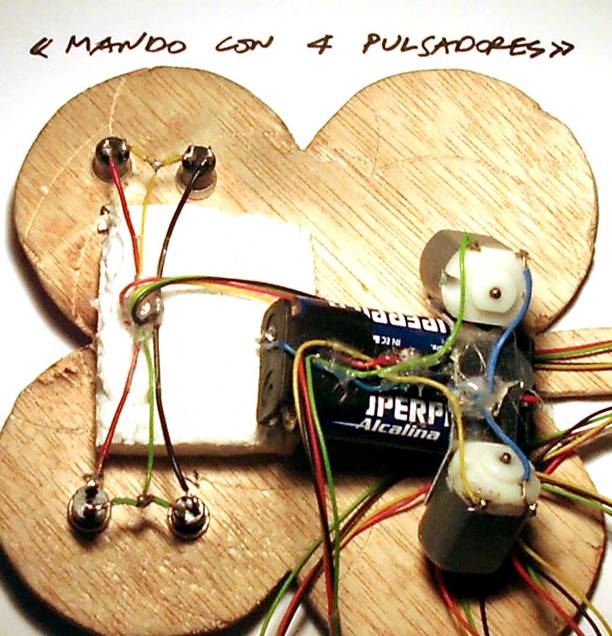
El circuito eléctrico que pemite el control del insectoide es de enorme simplicidad en su representación simbólica, ya que tiene el aspecto de una celosía compuesta de cuatro cuadrados con las caras pegadas: en las interiores verticales se sitúan las pilas, en las interiores horizontales los motores y en las exteriores verticales los pulsadores; aunque las pilas están conectadas entre sí, cada una suministra corriente de forma independiente y al no producirse la suma de sus tensiones o de sus corrientes, no podemos hablar de una disposición en serie. Su implementación y conexionado presenta más complicaciones, ya que hay cables que no necesitan extenderse desde el mando hasta el móvil: el que sale del punto en común de las pilas y se bifurca para contactar ambos motores (situado en la cruceta central del esquema) y los que unen los pulsadores entre sí (que son las esquinas exteriores del esquema). Ahora partirían del insectoide hacia los pulsadores, un cable desde cada motor más los correspondientes a los polos positivode la pila superior y negativo de la inferior.
Se puede comprobar, sobre el esquema o una vez terminado el proyecto que, quitando una y otra pila, los motores seguirían funcionando, pues la idea es que la pila superior sea la que permita el avance, presionando dos pulsadores de los lados a la vez (y la inferior el retroceso presionando los otros dos). Surge así la posibilidad de plantear un proyecto más simplificado, en el que nuestro insectoide utilice un portapilas de 1,5 V y dos pulsadores en el mando, con lo que podría trazar trayectorias rectas o curvas pero sólo en el sentido de avance. Es una opción casi la mitad de económica, pero además nos permite sustituir los pulsadores por pequeños interruptores de más fácil localización en las tiendas de componentes eléctricos; también pueden fabricarse los pulsadores con chapas de hojalata, chinchetas, clips, … Otra idea es reducir el tamaño del mando de modo que baste una sola mano para sujetarlo y su dedo gordo para presionar uno o dos pulsadores a la vez.
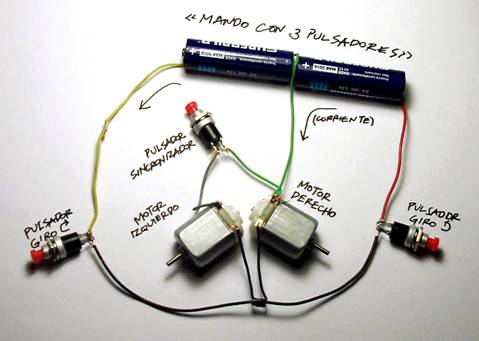
e) Circuito de mando con tres pulsadores:En el propósito de no renunciar a que nuestro bichoide avance, gire y retroceda, y añadiendo la idea de controlarlo con una sola mano, surge la posibilidad de crear un circuito de mando con tres pulsadores, que además nos permite continuar con la progresión en dificultad del análisis de los circuitos eléctricos. Como se observa en el esquema, las dos pilas están conectadas como en el proyecto anterior (son independientes, no están en disposición serie) y ambas llevan asociadas un pulsador, de manera que se logra el giro de uno de los motores, en un sentido u otro, jugando con la dirección de la corriente; el tercer pulsador sirve para sincronizar al segundo motor (conectado en paralelo) con el sentido de giro que se haya determinado para el primero. Dicho de otro modo, para el avance o el retroceso se necesita presionar dos pulsadores simultáneamente, mientras que para girar basta con pulsar uno de los dos comentados al principio, aunque sólo gire un motor. Conviene situar en el mando a los tres pulsadores muy próximos y en línea, ubicando en el medio el “sincronizador”.
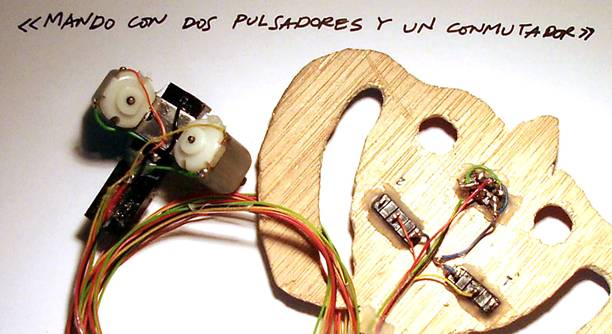
Este circuito no sólo es más complejo de entender para el alumno, también su implementación presenta mayores dificultades que en casos anteriores. Cinco son los cables que parten del mando, ya que un borne del pulsador de un extremo se une con otro del situado en el extremo contrario; este mismo cable (situado en la parte inferior de la imagen) se bifurca, sobre el portapilas, para conectarse con un borne de cada motor. f) Circuito de mando de dos pulsadores y un conmutador:Con este circuito vuelven a utilizarse tres elementos de control sobre el mando (que ahora debe manejarse con las dos manos) y se combinan aspectos del análisis de circuitos eléctricos tratados en los distintos apartados anteriores.
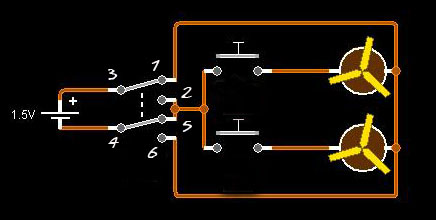
Para su funcionamiento se utiliza un conmutador de sólo dos posiciones para efectuar el avance o el retroceso del insectoide, siendo los pulsadores, cada uno asignado a un motor, los encargados de cerrar el circuito; la conexión en paralelo permite que compartan la corriente suministrada por la pila de 1,5 V. Los cables soldados en los bornes exteriores del conmutador se cruzan de modo similar al del circuito de mando del apartado c); uno de los cables salientes del mando va directamente a los motores conectándose a un borne de cada uno de ellos, y el otro cable es compartido por los pulsadores antes de dirigirse hacia los motores previamente pegados en el portapilas. Los cables de alimentación de éste también se conectan en los bornes intermedios del conmutador, por lo que sólo se necesitan cinco cables entre el mando y el insectoide.
g) ConclusiónLa realización del conjunto de actividades propuestas en este artículo demuestra que, con unos pocos conocimientos y medios materiales, cualquiera puede proponer a sus alumnos de cualquier nivel, construir un artefacto móvil con el que disfrutarán del área de Tecnología y que les servirá para entender de un modo atractivo el funcionamiento de los circuitos eléctricos elementales. ROBOT-BICHOS ANALÓGICOS Ia) Introducción:En el artículo anterior, ya comenté que una forma alternativa y muy económica de acercar a los alumnos hacia la robótica es construyendo un artefacto móvil de reducidas dimensiones y que se apoya directamente sobre los ejes de sus motores (previamente forrados con la funda de plástico de un cable eléctrico grueso) para desplazarse. Ahora la propuesta consistirá en lograr que los robot-bichos puedan funcionar de un modo autónomo modificando la dirección de giro de sus motores ante la presencia de luz, humedad o contacto en su entorno próximo; utilizando una linterna, una línea de agua o la presión de los dedos, podremos forzar su rastreo.
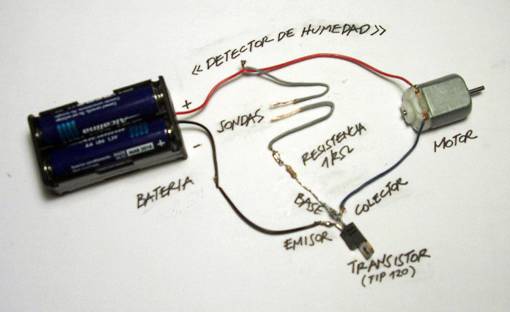
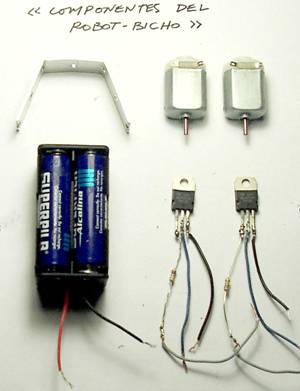
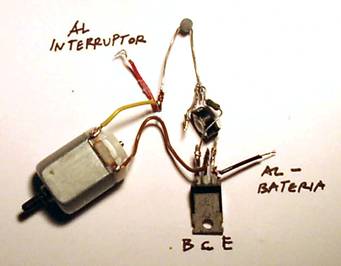
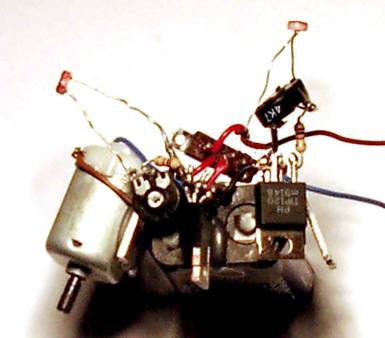
Para la construcción de los robot-bichos analógicos bastará con disponer de dos motores con caras planas, un trozo de perfil plano perforado de aluminio y de uno o dos portapilas pegados, según los casos. La incorporación sobre el portapilas “motorizado” de unos pocos dispositivos electrónicos (transistores, resistencias o condensadores) dotarán al insectoide de una sensibilidad acusada a variables físicas externas. Su aspecto queda definido por la inspiración que nos proporcionan los insectos terrestres: el portapilas hace de abdomen, los motores de tórax, los transistores de mandíbulas y los condensadoreses o las resistencias de antenas. b) robot-bicho hidrófiloEn este modelo se utiliza un circuito sensible a la humedad (por duplicado), también muy fácil de montar y de entender, ya que para aprovechar de un modo práctico la conductividad eléctrica del agua, bastan un transistor y una resistencia como componentes electrónicos. Como puede observarse en la foto del circuito, las denominadas sondas están compuestas por dos cables finos pelados (a modo de escobillas) que se situarán con una separación de apenas 1 mm, de modo que cuando una gota de agua caiga entre ambos, se cerrará el circuito interior que une la batería (con tensión 6 V) y la base del transistor. Una débil corriente circulará por la gota de una escobilla a otra y, en este caso, se necesita intercalar una resistencia de 1 KOhm para proteger la base, evitando la destrucción del transistor en el caso de que los cables se tocaran accidentalmente.
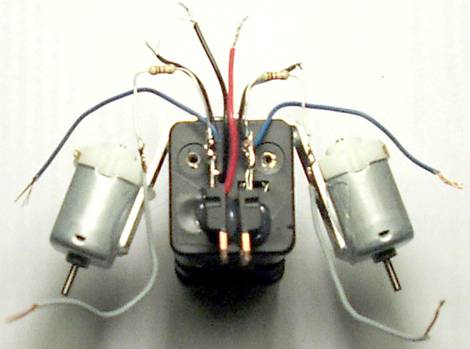
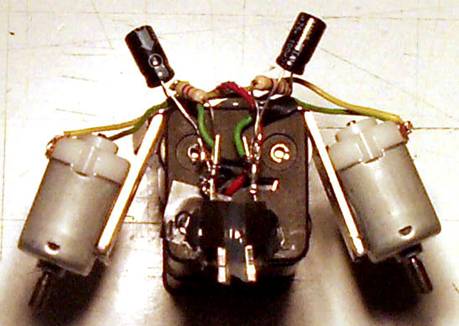
Como el transistor elegido TIP 120 contiene un montaje Darlington, la sensibilidad de este detector de humedad es lo suficientemente grande para que se cree una corriente en el colector que recorra el circuito eléctrico principal que une batería y motor, haciendo que éste se active; el transistor se podría decir que funciona como un interruptor activado por agua que cierra el circuito exterior. A cada motor le corresponderá un circuito con su transistor y sus sondas, y ambos circuitos se conectarán después en paralelo compartiendo la batería; los componentes de uno y otro circuito se ubicarán sobre el portapilas dispuestos simétricamente. En las imágenes se observan las posibles etapas para la construcción este modelo, empezando por pelar seis cables de unos 5 cm de largo (a los que después se ajustará la longitud una vez se sitúen sobre el portapilas) pareados según tres colores. La resistencia de protección de la base (a la que conviene no recortar sus patillas, pues luego se convertirán en las antenas) se suelda en el extremo de la patilla izquierda del transistor, por un lado, y por otro a uno de los cables que formará la sonda; en la patilla central (colector) se soldará un cable que se conectará a uno de los bornes del motor y en la patilla derecha (emisor) se soldará un cable (mejor de color negro) que se unirá con el cable negro (polo negativo) que sale del portapilas.
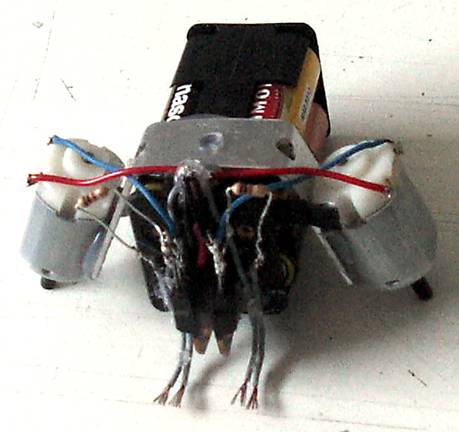
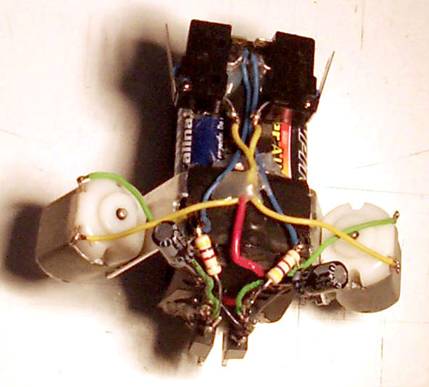
El siguiente paso consiste en pegar todos los elementos sobre el portapilas de 6V. Con la pistola de termofusible caliente, adherimos el perfil en uno de los extremos del portapilas, a continuación, una vez la unión anterior se haya enfriado, pegamos los motores cuidando que sus ejes (en los que insertaremos a presión una funda de cable eléctrico) sobresalgan lo suficiente para que el portapilas roce lo menos posible sobre una superficie horizontal. Después pasamos a pegar los transistores (con las patillas hacia arriba, colocados de canto y con sus dorsos enfrentados) en el centro de la cara frontal del portapilas y con cuidado de que sobresalgan, pero sin llegar a rozar con la superficie horizontal.
Superada la etapa anterior, es el momento de conectar y soldar los distintos componentes, comenzando por los cables que van unidos al polo positivo de la pila (cable rojo): dos que saldrían hacia uno de los bornes de cada motor y otros dos que harán de sondas, situándose pegados al portapilas al lado de cada uno de los transistores; el punto común a todos los cables anteriores conviene pegarlos sobre la parte superior del portapilas, recubriéndolos de pegamento para aislarlos eléctricamente del perfil de aluminio y de otros posibles contactos. Lo siguientes cables en conectar son aquellos que partían del emisor de cada transistor y que van a masa, es decir, que se unen con el cable negro correspondiente al polo negativo de la batería. Por último, se soldarán los cables que partiendo de cada colector se dirigen al borne que ha quedado libre en su respectivo motor. El robot-bicho ya estaría terminado a falta de darle algunos toques finales, como pegar en paralelo a cada uno de los cable de sonda situado al lado de los transistores, el cable soldado a la patilla de cada resistencia (antenas). Ambos pares de cables se pelarán unos 5 mm, se abrirán sus hilos de cobre y se doblarán para apoyar sobre el plano en el que se sitúe el insectoide, separándose entre sí lo justo para evitar el contacto directo.
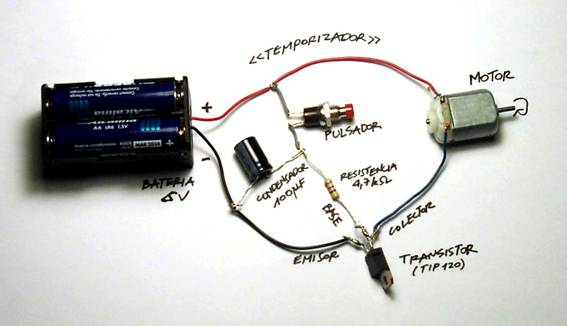
Para observar su funcionamiento debemos buscar una superficie lisa e impermeable, sirviéndonos de un inyector de plástico de 5 ml (o similar) para impulsar una gota de agua sobre las escobillas de la sonda y lograr la activación de uno o dos motores, lo que provoca el desplazamiento durante unos segundos del bichoide; si se crean una serie de manchas de agua sobre la superficie, podemos lograr que el movimiento sea más prolongado en el tiempo, si bien totalmente descontrolado. c) robot-bicho capacitivoSi en el ejemplo anterior sustituimos las sondas por un pulsador, bastará presionarlo para que el motor se accione y nuestro robot-bicho se ponga en marcha, aunque sólo sea para iniciar un giro; el problema es que apenas avanzará, ya que al distanciarse de nuestras manos dejaremos de pulsar para cerrar el circuito que proporciona corriente a la base del transistor. La manera de conseguir un movimiento continuado, al menos durante algunos segundos, podría lograrse incorporando un condensador al circuito.
En la imagen se sitúa este tercer elemento en el circuito interno del esquema eléctrico, conectado en un extremo (el indicado en el condensador como de polaridad negativa) al cable negro del portapilas, y en el otro extremo al nodo resistencia-pulsador. Lo que sucederá en esta nueva disposición es que al presionar el pulsador, el condensador se llenará casi instantáneamente de carga eléctrica, y cuando se abra la conexión del pulsador, dicha carga se moverá en dirección hacia la base, permitiendo en paso de la corriente de la pila del colector al emisor y permitiendo el movimiento del motor durante algunos segundos. Los valores de condensador y resistencia, de los que depende el denominado tiempo de descarga (que estimo en casi 3 segundos), los he escogido más bien por razones de influencia en el aspecto del robot-bicho, ya que un condensador de mayor tamaño no se percibía como una antena y la resistencia era la de mayor grosor que disponía en el momento del montaje. Queda abierta la posibilidad de experimentar con otras combinaciones o de mejorar los resultados intercalando, por ejemplo, un potenciómetro (que haría de ojo) en paralelo con el condensador. A la batería de 6 V se conectan en paralelo los dos circuitos temporizadores cuyos elementos electrónicos (transistor, resistencia y condensador) deberán ser soldados antes de incoporarse sobre el portapilas. Por otro lado se preparía el cableado que sale de los motores y de los pulsadores; éstos son del tipo fin de carrera ya que se pegan mejor en sus caras laterales, y así dispuestos también se presionan más cómodamente de modo individual (para provocar giros) o al unísono (para el avance recto).
En la patilla de los emisores se soldará un cable negro de 2 cm que se unirá después con el que sale del portapilas del mismo color (polo negativo) y también la patilla metálica (que conviene no recortar) del negativo de cada condensador correspondiente. En los colectores se conectará un cable de 5 cm que irá directamente a uno de los bornes del motor y finalmente en las bases se soldará uno de los extremos de la respectiva resistencia de descarga; el otro extremo de éstas, con longitud de 4 mm, se soldará con la patilla recortada por la mitad del polo positivo del condensador.
A continuación se debe preparar el cableado que sale de los finales de carrera: en los bornes NO se soldará un cable de casi 6 cm que será el que enlace con el nodo resistencia-condensador, y de los bornes COM partirá un cable de 7 cm que irá directamente al contacto libre del motor correspondiente, dejando pelado 5 mm el recubrimiento plástico en algún punto intermedio de su trayectoria, donde se conectará con el polo positivo de la pila (cable rojo).
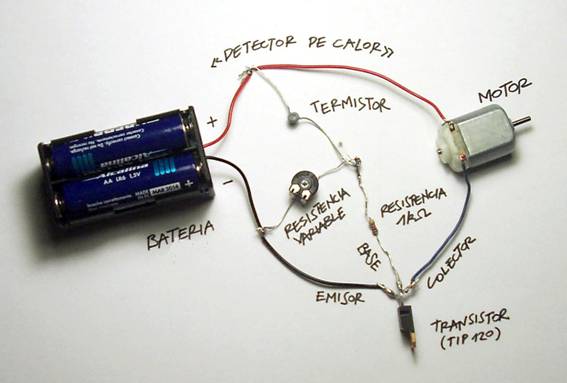
Preparadas ambas partes del circuito temporizador, procederemos a pegar los transitores en la cara frontal del portapilas y los pulsadores su parte superior trasera, donde sean accesibles. Para terminar el robot-bicho bastará con conectar los cables que van a los bornes de los motores, los correspondientes a cada nodo antes comentados, así como los que al unirse a los polos de la batería, permiten configurar un esquema de dos circuitos en paralelo. Al probar su funcionamiento tendremos la sensación de que es un insectoide que intentásemos atrapar y que siempre se aleja unos centímetros de nuestra mano. d) Conclusión:Con escasos conocimientos de electrónica y unos pocos componentes, los alumnos podrán desarrollar un proyecto de robot-bicho que explica en su funcionamiento experimentos científicos elementales como la conductividad del agua o las posibilidades de almacenamiento de pequeñas cantidades de energía eléctrica. ROBOT-BICHOS ANALÓGICOS IIEn este segundo capítulo de la construcción de robot-bichos analógicos continuaremos disponiendo los elementos electrónicos de modo que simulen ser insectos y funcionen de un modo autónomo, ya que la dirección de giro de sus motores se verá alterada por la presencia de luz o temperatura en su entorno próximo. a) robot-bicho termotrópicoUna forma de lograr que un circuito de control se a sensible al aumento de la temperatura es utilizando un termistor NTC, es decir, una resistencia variable que disminuye de valor en ohmios a medida que aumenta el calor en su superficie. Como puede observarse en el esquema de la figura, el termistor de 4,7 Kohmios (en frío) se une a la patilla libre de la resistencia de 1K conectada a la base del transistor, el cual cumple la función de interruptor-regulador del circuito principal. Cuando aumentamos la temperatura de termistor, simplemente con el contacto prolongado de las yemas de dos de nuestros dedos, su resistencia interna disminuye y la corriente que lo atraviesa alcanza el valor suficiente como para activar la base del transistor, cerrándose la conexión entre el colector y el emisor para que la corriente de la pila llegue hasta el motor y lo haga funcionar.
Cuanto mayor es el calor que acumula el termistor, mayor será la corriente en la base y en el circuito principal (y mayor la velocidad de los motores), hecho que también se observará a la inversa, ya que a medida que la NTC se enfría, una vez el bichoide se ha puesto en movimiento y cede la presión de nuestros dedos sobre sus antenas, la velocidad de los motores va disminuyendo gradualmente hasta que se detienen. Como sucede que en cada ámbito en el que mostrásemos funcionando al robot-bicho tendríamos una temperatura diferente o porque nuestro calor corporal (y la de nuestros dedos) es cambiante según el momento, necesitamos incorporar al circuito un potenciómetro (de 25 K) que permita, al variar el valor de su resistencia y de corriente que lo atraviesa, dosificar la mayor o menor entrada de corriente en la base, de tal modo que el insectoide pueda funcionar de manera casi idéntica en cualquier circunstancia.
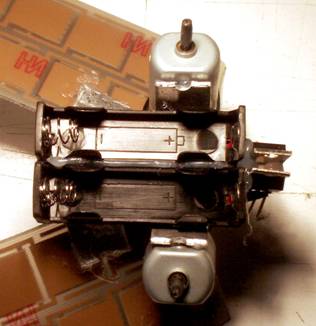
El punto de partida es la conexión de los elementos electrónicos que accionan cada motor por separado, ya que en este caso la configuración de ambos circuitos no es en paralelo compartiendo la batería, sino que serán independientes y el cuerpo del insectoide estará formado por dos portapilas de 3 V superpuestos. Antes de abordar la soldadura hay que recortar las patillas de la resistencia de base a la mitad de su longitud en uno de sus extremos, y preparar unos cables: dos para conectar a los bornes del motor, uno de 6 cm y otro de 3 cm, así como otros dos de 3 cm para la alimentación; también conviene romper la patilla sobrante del potenciómetro.
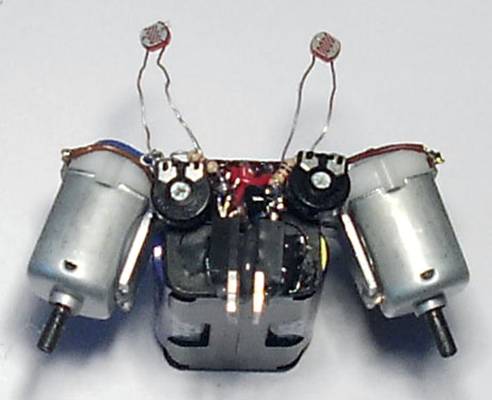
Una vez soldados ambos circuitos, se pegan los dos portapilas (con sus cables de conexión en el lado frontal) y sobre ambos, se fija el perfil de aluminio previamente doblado. Un conmutador doble, situado sobre éste último, permitirá que los circuitos sigan siendo independientes pero se activen al unísono, lo que tendremos en cuenta antes de cerrar las conexiones de cada circuito. La última fase es la de pegado de los transistores y de los motores al perfil correspondiente; con cuidado de no romper ninguna patilla de los distintos componentes, se aproximarán los circuitos sobre la parte central del frontal de los portapilas, quedando dispuestos de modo que los potenciómetros simulen ser los ojos del bichoide, y queden situados por encima de los transistores (mandíbulas) y debajo de los termistores (antenas).
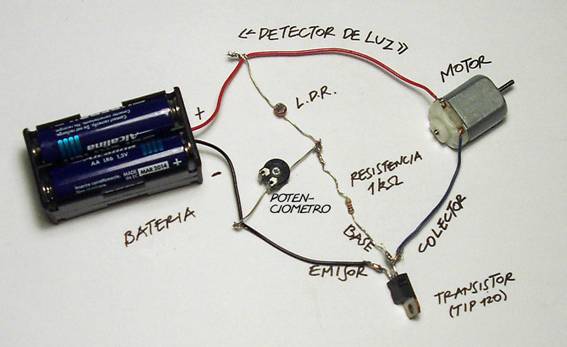
Antes de ponerlo en funcionamiento conviene supervisar que no se produce ningún contacto indeseado entre las patillas del transistor o entre cables. Presionando con los dedos los termistores, arrancaremos los motores sin apoyar sus ejes sobre la superficie horizontal y una vez estimemos que adquieren la suficiente velocidad, dejaremos que el bichoide se desplace libremente, repitiendo este proceso una vez se detenga al enfriarse los termistores. b) robot-bicho fototrópicoSi en el circuito anterior sustituimos el termistor por una LDR, es decir, una resistencia dependiente de la luz, el bichoide podrá ser conducido utilizando una linterna que incida alternativamente en las LDR convertidas en antenas. Esta resistencia también varía su magnitud en Kohmios de modo inverso a la exposición de luz que recibe: cuando está a oscuras su resistencia es alta y la corriente que circula por la base es insuficiente para encender el transistor, que al actuar como interruptor/regulador del circuito principal, no permite que se cierre el camino eléctrico que une pila y motor; lo contrario sucederá cuando el valor de resistencia disminuya debido a la incidencia de luz sobre ella. La presencia del resistor variable, conectado de modo que se crea un camino alternativo para la corriente que previamente ha atravesado la LDR, nos permite calibrar el funcionamiento del transistor a un determinado nivel de luz, ya que la corriente que circula hacia la base será proporcional al valor resistivo del potenciómetro: cuanto mayor sea su valor óhmico, más corriente se dirigirá hacia la base para activar el transistor.
Para el montaje de este robot-bicho se utiliza un solo portapilas de 3V, de modo que la corriente suministrada por la batería será compartida para activar los circuito electrónico de ambos motores en una configuración en paralelo y a través de un conmutador simple. El proceso de preparación y conexionado de los componentes es similar al del ejemplo termotrópico, empleando ahora un potenciómetro de 4,7 Kohmios.
c) robot-bicho fotófoboExiste también la posibilidad de que nuestro bichoide reaccione, al contrario que en el ejemplo anterior, ante la ausencia de luz y que la incidencia de ésta sobre las LDR actúe de modo que se paralicen los motores; de nuevo la presencia de un potenciómetro de 10 K en el circuito electrónico servirá para establecer el nivel de penumbra en el que el robot-bicho se desplace libremente en línea recta, hasta que focalicemos la luz en alguna de sus antenas provocando su giro hacia el lado contrario, es decir, huyendo de nuestro foco o linterna.
La resistencia dependiente de la luz aumenta su valor resistivo con la oscuridad con lo que dificulta el paso de corriente de retorno al polo negativo de la pila y provocando que toda la corriente que, en mayor o menor magnitud, atraviesa el potenciómetro se dirija hacia la base para accionar el transistor y permitir que exista una corriente del colector al emisor que cause la puesta en marcha del motor.
Otra vez los circuitos de cada motor compartirán la batería de 3 V, por lo que habrá que tener en cuenta en el conexionado la presencia del conmutador simple común a ambos. Cuando los circuitos electrónicos se hayan soldado, el paso siguiente consistirá en pegar los transistores al portapilas y terminar de conectar los cables sobrantes al interruptor y a los motores, previamente sujetos al perfil que abraza al portapilas.
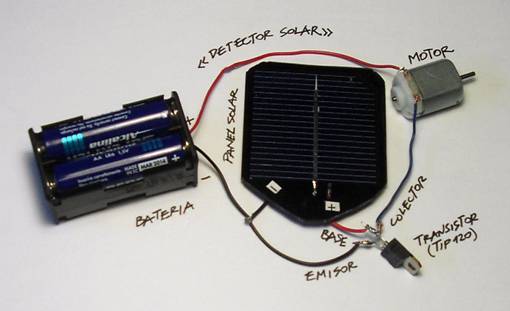
d) robot-bicho fotovoltaicoLa disposición de dos pequeños paneles fotovoltaicos sobre el portapilas (abdomen) a modo de alas a medio desplegar, confiere a este robot-bicho de un aspecto muy atractivo y singular, siendo además sorprendente verlo en acción ya que dirigiendo la luz de una linterna o un flexo hacia los paneles, podremos guiarlo hacia un punto determinado.
El principio de funcionamiento de este bichoide es simple: la débil corriente generada por el panel fotovoltaico es dirigida hacia la base del transistor (que es elemento de control en el circuito principal) y sirve para permitir que se cierre la conexión entre el colector y el emisor; como consecuencia, el motor es alimentado por la corriente (de una pila de 1,5 V) que recorre el circuito principal; el esquema electrónico se implementa por duplicado, con lo que cada motor tiene un funcionamiento independiente que permite el giro del móvil a ambos lados.
Para su elaboración necesitamos preparar previamente dos piezas (yo he utilizado perfil de alumnio perforado con un corte diagonal en uno de sus extremos) que permitan la sujeción de los paneles-alas, ya que éstos deben situarse pegados sobre el portapilas de tal modo que no se estorben entre sí, no queden en una posición retrasada (que desequilibre el móvil) y además no apoyen sobre los motores.
La construcción comenzaría con el pegado con la pistola termofusible de las caras laterales de dos portapilas de 1,5 V para después situar sobre ambas el perfil que sujeta los motores; una vez que éstos últimos tengan su posición definitiva, podemos fijar los pequeños paneles fotovoltaicos. Como puede observarse en la figura, antes de adherir los dos transistores (centrados en el frontal de los portapilas, a modo de cabeza y mandíbulas del bichoide) he doblado sus patillas unos 45º para que parezcan unas pequeñas antenas.
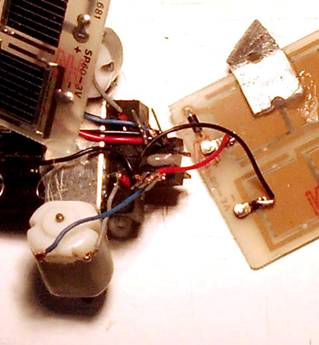
Como el conexionado es muy sencillo, he esperado a tener todos los elementos pegados sobre el portapilas para abordarlo. Cabe recordar que visto el transistor TIP 120 de frente sus patillas se ordenan alfabéticamente, quedando a la izquierda la base (de donde partirá un cable a conectarse directamente con el polo positivo del panel fotovoltaico), en medio el colector (que se une a través de un conductor con uno de los bornes del motor) y a la derecha el emisor (del que sale un cable que confluye con los cables negros de los polos negativos de la pila y del panel); el borne que ha quedado libre en el motor se conecta con el cable rojo (polo positivo) del portapilas. El proceso se repite para el circuito del otro motor y antes de soldar conviene probar que el panel fotovoltaico escogido genera la suficiente corriente (unos 500 mA nominales) para arrancar los motores al acercar el insectoide a una fuente de luz. e) ConclusiónHe utilizado en los robot-bichos una serie de circuitos simbólicos básicos que son los más comunmente utilizados en los libros de texto para explicar los principios de la electrónica, pero que no suelen pasar de ser unos esquemas gráficos sobre papel que en ocasiones, por falta de medios, no se ponen en práctica para hacerlos más inteligibles y atractivos para el alumno. ROBOT-BICHOS DIGITALESa) IntroducciónCualquier proyecto de robótica tiene como objetivo lograr la comunicación del robot con un ordenador, y que éste permita la programación de sus comportamientos utilizando un software de lenguaje natural. Entre ambos dispositivos se sitúa una tarjeta controladora que, en su función de interfase, se conecta por un lado a un puerto del ordenador, y por otro a los motores. Teniendo en cuenta el bajo valor de potencia eléctrica consumido por los robot-bichos, será necesario diseñar una tarjeta de reducido tamaño, de fácil sujeción sobre el portapilas, compuesta del mínimo de componentes electrónicos y sin presencia de relés (utilizados para determinar el sentido de salida de la corriente hacia el motor) que encarezcan su coste. Podemos programar nuestra tarjeta “controla-bichos” utilizando el lenguaje LOGO, de fácil aprendizaje para alumnos de secundaria; una vez conectada la tarjeta al puerto paralelo del ordenador, a su batería de alimentación y a los motores del insectoide, crearemos sencillos programas que automaticen sus movimientos, logrando incluso poder controlarlo directamente a través del teclado en tiempo real.
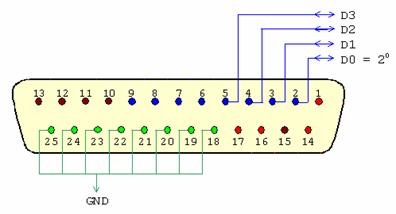
b) Diseño de la tarjeta controladoraEl puerto paralelo del ordenador se ha utilizado, antes de la generalización del standard USB para la conexión de periféricos, como puerto para el intercambio de datos con la impresora, pero la sencilla configuración de funciones en sus patillas, nos permite también utilizarla en aplicaciones como la nuestra, en la que sólo se necesitan intercambiar 4 bits de datos en la salida, es decir, una cantidad muy pequeña de información en código binario a procesar, algo que está perfectamente al alcance de la comprensión de nuestros alumnos.
Las controladoras comerciales utilizadas tradicionalmente en el área de Tecnología para la iniciación a la robótica en la ESO, a pesar de sus elevadas prestaciones y fácil implementación, presentan varios inconvenientes: son relativamente costosas (que no significa caras), su diseño electrónico y los programas que la inicializan son incomprensibles para el alumnado (y gran parte del profesorado) y además son aparatosas de manejar (necesitan una fuente de alimentación de 12 V y conectarse al ordenador con un cable muy rígido como es el utilizado para las conexiones al puerto paralelo). Además, en el propósito de poder programar el movimiento de un robot-bicho, hay que tener en cuenta que los ejes de sus motores giran a gran velocidad con apenas un 1 voltio entre sus bornes, de modo que la tensión de 5 V que suministran las salidas de las controladoras comerciales, provoca una excesiva velocidad.
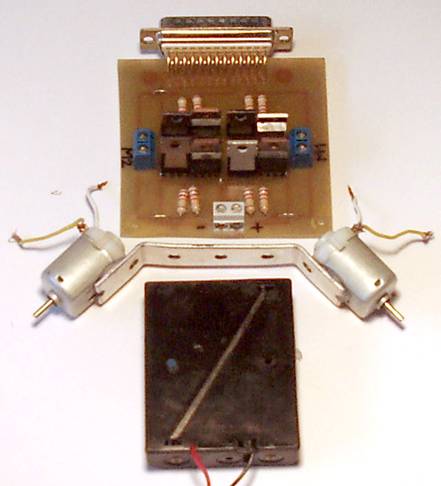
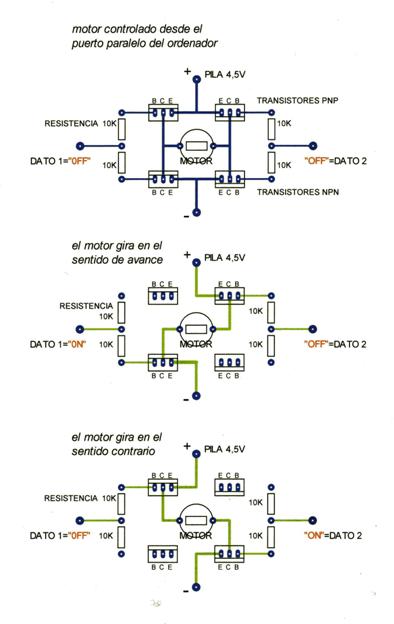
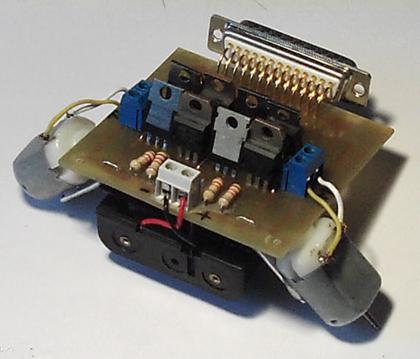
Las tarjetas controladoras son necesarias porque la corriente suministrada por el ordenador a través del puerto paralelo es insuficiente para activar con eficacia un pequeño motor de corriente continua, y se necesita un circuito de potencia (o driver) que le suministre la intensidad necesaria. La configuración escogida es la clásica de “puente en H”, que consiste en conectar los colectores de 4 transistores (dos PNP y dos NPN) a los bornes de cada motor; al estar constituido por transistores, el robot-bicho es directamente controlado mediante la débil señal de los pines de datos del puerto paralelo, que se conectarán a la base de dichos transitores (se eligen tipo TIP 120 Y 125 por ser un montaje Darlington de alta ganancia y protegido con diodos y resistencias, lo que evita daños en la placa base del ordenador). El funcionamiento de estos circuitos se explica muy fácilmente: cuando el bit D0 (pin 2) se pone en on y el D1 (pin 3) en OFF, el borne derecho del motor se encuentra a 4,5 V y el izquierdo a 0 V, con lo que el motor gira en un sentido; cuando el bit D0 está OFF y el D1 en on, es el borne izquierdo el que está alimentado mientras que el derecho se halla conectado a tierra, de modo que el motor gira en sentido opuesto. Para el segundo motor se utilizarán los pines 4 (D2) y 5 (D3); con ambos motores debe evitarse que el programa cree un conflicto al poner en on las dos entradas de datos a la vez.
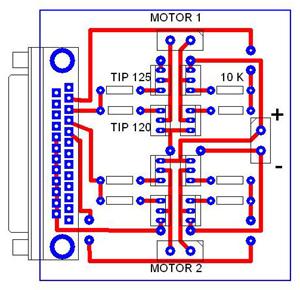
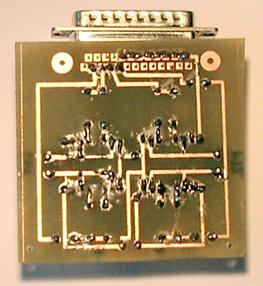
Para la construcción de la tarjeta se utilizan: un conector DB25 macho (para el cable procedente del puerto paralelo del ordenador), la etapa de potencia y control del sentido de giro o parada de los dos motores (constituida por transistores TIP 120 y 125), resistencias de 10K (para la protección de la base de los transistores) y los conectores para los motores y para la alimentación de la placa (una pila de 4,5 voltios se encargará de que todo funcione según las indicaciones del programa de la pantalla). Con un programa de diseño asistido de placas PCB se dibujan las pistas de cobre que relacionarán los componentes electrónicos y los pines del conector; después se imprime en blanco y negro en un papel vegetal utilizando una impresora láser. La fabricación se hará utilizando una placa fotosensible de fibra de vidrio que una vez recortada al tamaño estimado se lleva, con el papel vegetal encima, a una insoladora de rayos ultravioleta donde se expondrá a la luz durante unos 4 minutos. La resina fotosensible que cubre la placa habrá sufrido una reacción química, a excepción de las pistas tapadas con la tinta negra del papel, circunstancia que es aprovechada en el proceso de revelado; éste consiste en sumergir la placa unos minutos en un líquido, denominado revelador, en el que la resina sensibilizada se irá diluyendo para dejar en primer plano una superficie de cobre desprotegida, exceptuando las pistas todavía cubiertas de resina. En el siguiente proceso, denominado de atacado con un ácido (cloruro férrico), el cobre de la placa, sumergida en otra cubeta, se disuelve dejando al cabo de unos minutos las pistas de nuestra tarjeta controladora nítidamente marcadas sobre la superficie de fibra de vidrio. Por último se lava la placa y se elimina la resina que cubre las pistas con estropajo y alcohol de quemar; cuando se realicen los taladros en los puntos correspondientes a la ubicación de los componentes del circuito, se irán introduciendo sus patillas y se soldarán.
c) Programación de la tarjetaPara automatizar los movimientos del bichoide utilizo el programa gratuito MsLogo, que utiliza un lenguaje de programación muy sencillo de comprender (y en castellano) . La instrucción ESCRIBEPUERTO 888 es la que me va a servir para, a través del puerto paralelo, enviar a los motores los datos 1, 2, 4 ó 8 (que corresponden a la numeración en binario) para que funcionen independientemente y girando en uno u otro sentido; para que funcionen ambos a la vez debo sumar dichas cifras y enviar los datos 5, 6, 9 ó 10. Los siguientes programas sirven de ejemplo: PROGRAMACIÓN DE LA TARJETA ROBOT-BICHOS CON LOGO PARA OFF ESCRIBEPUERTO 888 0 FIN (se desconectan los dos motores) PARA DATOS ESCRIBEPUERTO 888 1 ESPERA 100 OFF (el motor 1 gira un segundo y se para) ESCRIBEPUERTO 888 2 ESPERA 100 OFF (cambia el sentido de giro un seg. y se para) ESCRIBEPUERTO 888 4 ESPERA 100 OFF (el motor 2 gira un segundo y se para) ESCRIBEPUERTO 888 8 ESPERA 100 OFF (cambia el sentido de giro un seg. y se para) FIN PARA AVANCE ESCRIBEPUERTO 888 5 ESPERA 200 OFF FIN (el insectoide avanza dos segundos y se para) PARA ATRAS ESCRIBEPUERTO 888 10 ESPERA 200 OFF FIN (retrocede durante dos segundos y se para) PARA GIRO_D ESCRIBEPUERTO 888 9 ESPERA 50 OFF FIN (gira a la derecha medio segundo y se para) PARA GIRO_I ESCRIBEPUERTO 888 6 ESPERA 50 OFF FIN (gira a la izquierda medio segundo y se para) PARA ZIGZAG GIRO_I GIRO_D AVANCE ATRAS FIN (se mueve con los procedimientos definidos anteriormente) PARA TECLA HAZ “X LC (lee carácter pulsado en el teclado) SI :X = “Y [AVANCE] (asigna la tecla “Y” para avanzar) SI :X = “H [ATRAS] (asigna la tecla “H” para retroceder) SI :X = “U [GIRO_D] (asigna la “U” para girar a la derecha) SI :X = “T [GIRO_I] (asigna la “T” para girar a la izquierda) TECLA (repite el programa indefinidamente) FIN NOTA: el último ejemplo (una vez definidos los prodcedimientos que lo integran) nos permitiría el control del robot-bicho desde el teclado en tiempo real, y una vez en funcionamiento, la posibilidad de trazar trayectorias termina sólo cuando pulsemos la tecla Esc. Como queda patente, no se necesita cargar ninguna instrucción que inicialice la tarjeta, sino que se programa casi en lenguaje máquina, expresando los datos que van a controlar los motores en código binario. d) Montaje del robot-bicho y su cableadoCuando la placa controladora esté terminada, podremos construir el robot-bicho pegando los motores (con un cable de unos 4 cm soldado en cada borne) al perfil y éste al portapilas; la tarjeta se situará sobre la batería sujeta con pegamento o con un velcro adhesivo.
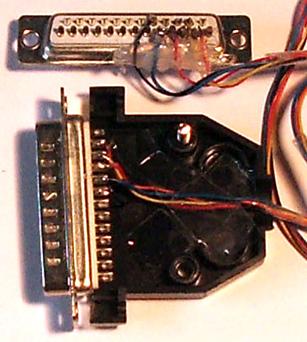
Una vez comprendida la programación y construido el robot-bicho, falta preparar un cable que me conecte ordenador y móvil; bastarán dos conectores de 25 pines (un macho y una hembra) y cinco cables de colores,uno para cada pin de datos y otro para la masa (pines del 18 al 25). Yo he utilizado el cable de un ratón antiguo, y una vez soldados punto a punto a ambos conectores, será el momento de ponerlo a prueba y disfrutar de este experimento robótico.
e) Conclusión:Para construir un pequeño robot programable no hace falta efectuar grandes inversiones ni tener profundos conocimientos de electrónica, tampoco es necesario utlizar un sistema propietario que obligue a utilizar componentes comerciales no estandarizados ni localizables en cualquier tienda de electrónica. El proceso de desarrollo y montaje de una placa controladora como la propuesta permitiría iniciarse a cualquier alumno en el campo de la robótica básica de una forma atractiva y sin dedicar excesivo tiempo en este objetivo. |