| MONOGRÁFICO: ROBOT-BICHOS - ROBOT-BICHOS ANALÓGICOS II |
 |
 |
 |
| CAJON DE SASTRE - Cajon de sastre | |||||||
| Escrito por Leopoldo Mosquera Taboada | |||||||
| Viernes, 02 de Mayo de 2008 00:00 | |||||||
Página 4 de 5
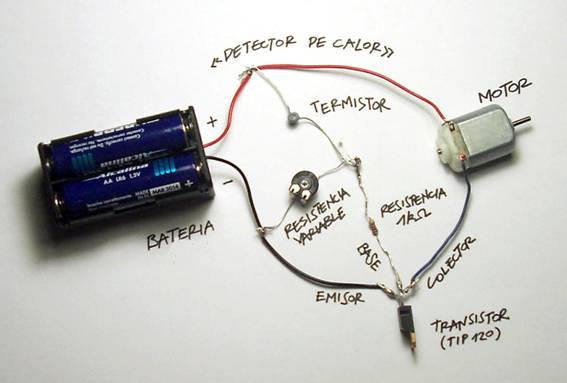
ROBOT-BICHOS ANALÓGICOS IIEn este segundo capítulo de la construcción de robot-bichos analógicos continuaremos disponiendo los elementos electrónicos de modo que simulen ser insectos y funcionen de un modo autónomo, ya que la dirección de giro de sus motores se verá alterada por la presencia de luz o temperatura en su entorno próximo. a) robot-bicho termotrópicoUna forma de lograr que un circuito de control se a sensible al aumento de la temperatura es utilizando un termistor NTC, es decir, una resistencia variable que disminuye de valor en ohmios a medida que aumenta el calor en su superficie. Como puede observarse en el esquema de la figura, el termistor de 4,7 Kohmios (en frío) se une a la patilla libre de la resistencia de 1K conectada a la base del transistor, el cual cumple la función de interruptor-regulador del circuito principal. Cuando aumentamos la temperatura de termistor, simplemente con el contacto prolongado de las yemas de dos de nuestros dedos, su resistencia interna disminuye y la corriente que lo atraviesa alcanza el valor suficiente como para activar la base del transistor, cerrándose la conexión entre el colector y el emisor para que la corriente de la pila llegue hasta el motor y lo haga funcionar.
Cuanto mayor es el calor que acumula el termistor, mayor será la corriente en la base y en el circuito principal (y mayor la velocidad de los motores), hecho que también se observará a la inversa, ya que a medida que la NTC se enfría, una vez el bichoide se ha puesto en movimiento y cede la presión de nuestros dedos sobre sus antenas, la velocidad de los motores va disminuyendo gradualmente hasta que se detienen. Como sucede que en cada ámbito en el que mostrásemos funcionando al robot-bicho tendríamos una temperatura diferente o porque nuestro calor corporal (y la de nuestros dedos) es cambiante según el momento, necesitamos incorporar al circuito un potenciómetro (de 25 K) que permita, al variar el valor de su resistencia y de corriente que lo atraviesa, dosificar la mayor o menor entrada de corriente en la base, de tal modo que el insectoide pueda funcionar de manera casi idéntica en cualquier circunstancia.
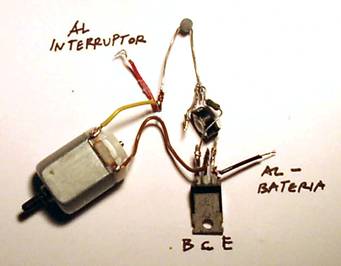
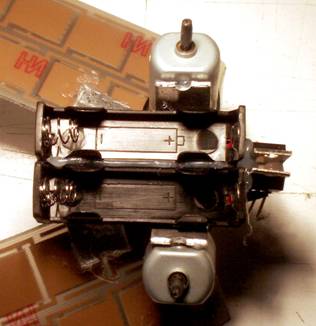
El punto de partida es la conexión de los elementos electrónicos que accionan cada motor por separado, ya que en este caso la configuración de ambos circuitos no es en paralelo compartiendo la batería, sino que serán independientes y el cuerpo del insectoide estará formado por dos portapilas de 3 V superpuestos. Antes de abordar la soldadura hay que recortar las patillas de la resistencia de base a la mitad de su longitud en uno de sus extremos, y preparar unos cables: dos para conectar a los bornes del motor, uno de 6 cm y otro de 3 cm, así como otros dos de 3 cm para la alimentación; también conviene romper la patilla sobrante del potenciómetro.
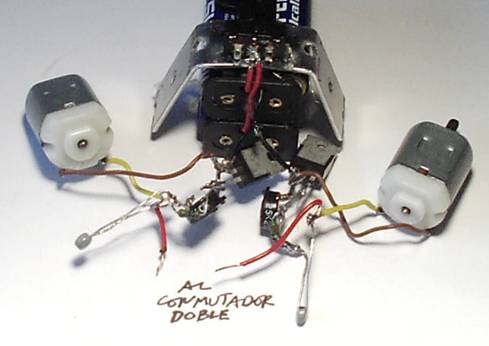
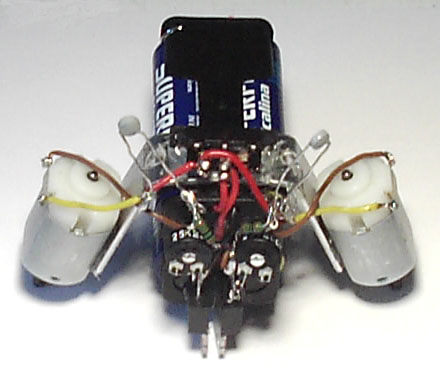
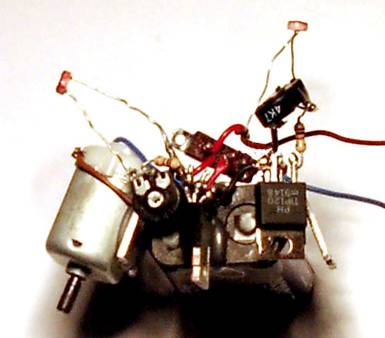
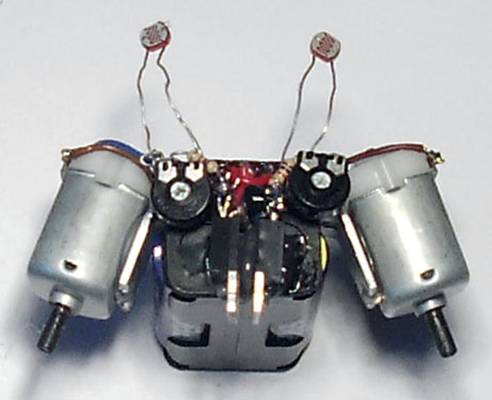
Una vez soldados ambos circuitos, se pegan los dos portapilas (con sus cables de conexión en el lado frontal) y sobre ambos, se fija el perfil de aluminio previamente doblado. Un conmutador doble, situado sobre éste último, permitirá que los circuitos sigan siendo independientes pero se activen al unísono, lo que tendremos en cuenta antes de cerrar las conexiones de cada circuito. La última fase es la de pegado de los transistores y de los motores al perfil correspondiente; con cuidado de no romper ninguna patilla de los distintos componentes, se aproximarán los circuitos sobre la parte central del frontal de los portapilas, quedando dispuestos de modo que los potenciómetros simulen ser los ojos del bichoide, y queden situados por encima de los transistores (mandíbulas) y debajo de los termistores (antenas).
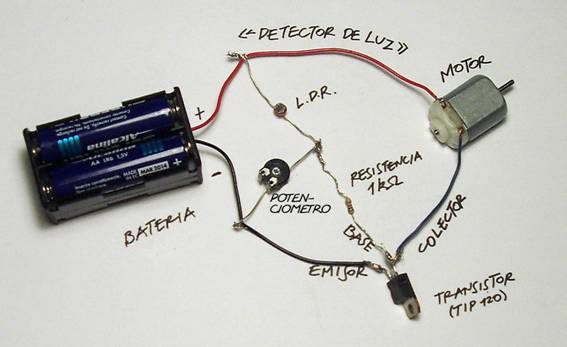
Antes de ponerlo en funcionamiento conviene supervisar que no se produce ningún contacto indeseado entre las patillas del transistor o entre cables. Presionando con los dedos los termistores, arrancaremos los motores sin apoyar sus ejes sobre la superficie horizontal y una vez estimemos que adquieren la suficiente velocidad, dejaremos que el bichoide se desplace libremente, repitiendo este proceso una vez se detenga al enfriarse los termistores. b) robot-bicho fototrópicoSi en el circuito anterior sustituimos el termistor por una LDR, es decir, una resistencia dependiente de la luz, el bichoide podrá ser conducido utilizando una linterna que incida alternativamente en las LDR convertidas en antenas. Esta resistencia también varía su magnitud en Kohmios de modo inverso a la exposición de luz que recibe: cuando está a oscuras su resistencia es alta y la corriente que circula por la base es insuficiente para encender el transistor, que al actuar como interruptor/regulador del circuito principal, no permite que se cierre el camino eléctrico que une pila y motor; lo contrario sucederá cuando el valor de resistencia disminuya debido a la incidencia de luz sobre ella. La presencia del resistor variable, conectado de modo que se crea un camino alternativo para la corriente que previamente ha atravesado la LDR, nos permite calibrar el funcionamiento del transistor a un determinado nivel de luz, ya que la corriente que circula hacia la base será proporcional al valor resistivo del potenciómetro: cuanto mayor sea su valor óhmico, más corriente se dirigirá hacia la base para activar el transistor.
Para el montaje de este robot-bicho se utiliza un solo portapilas de 3V, de modo que la corriente suministrada por la batería será compartida para activar los circuito electrónico de ambos motores en una configuración en paralelo y a través de un conmutador simple. El proceso de preparación y conexionado de los componentes es similar al del ejemplo termotrópico, empleando ahora un potenciómetro de 4,7 Kohmios.
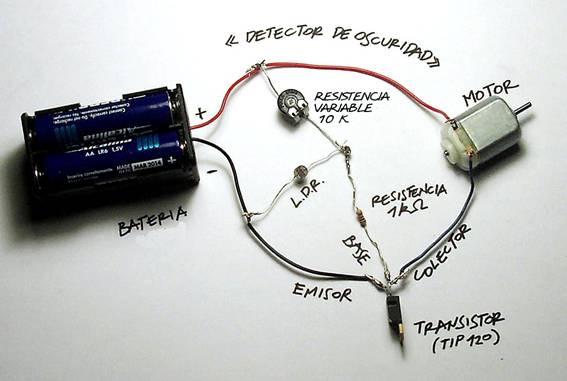
c) robot-bicho fotófoboExiste también la posibilidad de que nuestro bichoide reaccione, al contrario que en el ejemplo anterior, ante la ausencia de luz y que la incidencia de ésta sobre las LDR actúe de modo que se paralicen los motores; de nuevo la presencia de un potenciómetro de 10 K en el circuito electrónico servirá para establecer el nivel de penumbra en el que el robot-bicho se desplace libremente en línea recta, hasta que focalicemos la luz en alguna de sus antenas provocando su giro hacia el lado contrario, es decir, huyendo de nuestro foco o linterna.
La resistencia dependiente de la luz aumenta su valor resistivo con la oscuridad con lo que dificulta el paso de corriente de retorno al polo negativo de la pila y provocando que toda la corriente que, en mayor o menor magnitud, atraviesa el potenciómetro se dirija hacia la base para accionar el transistor y permitir que exista una corriente del colector al emisor que cause la puesta en marcha del motor.
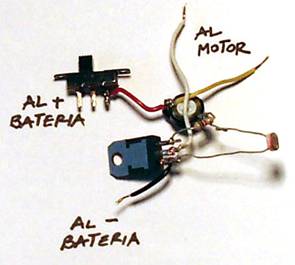
Otra vez los circuitos de cada motor compartirán la batería de 3 V, por lo que habrá que tener en cuenta en el conexionado la presencia del conmutador simple común a ambos. Cuando los circuitos electrónicos se hayan soldado, el paso siguiente consistirá en pegar los transistores al portapilas y terminar de conectar los cables sobrantes al interruptor y a los motores, previamente sujetos al perfil que abraza al portapilas.
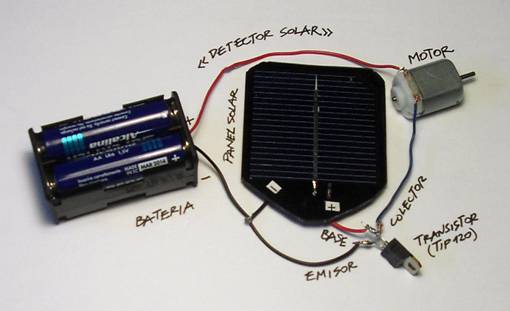
d) robot-bicho fotovoltaicoLa disposición de dos pequeños paneles fotovoltaicos sobre el portapilas (abdomen) a modo de alas a medio desplegar, confiere a este robot-bicho de un aspecto muy atractivo y singular, siendo además sorprendente verlo en acción ya que dirigiendo la luz de una linterna o un flexo hacia los paneles, podremos guiarlo hacia un punto determinado.
El principio de funcionamiento de este bichoide es simple: la débil corriente generada por el panel fotovoltaico es dirigida hacia la base del transistor (que es elemento de control en el circuito principal) y sirve para permitir que se cierre la conexión entre el colector y el emisor; como consecuencia, el motor es alimentado por la corriente (de una pila de 1,5 V) que recorre el circuito principal; el esquema electrónico se implementa por duplicado, con lo que cada motor tiene un funcionamiento independiente que permite el giro del móvil a ambos lados.
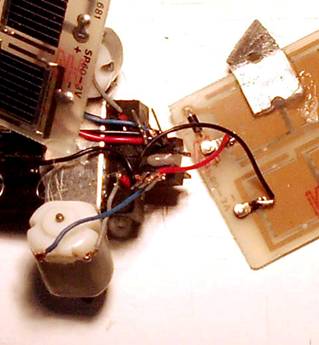
Para su elaboración necesitamos preparar previamente dos piezas (yo he utilizado perfil de alumnio perforado con un corte diagonal en uno de sus extremos) que permitan la sujeción de los paneles-alas, ya que éstos deben situarse pegados sobre el portapilas de tal modo que no se estorben entre sí, no queden en una posición retrasada (que desequilibre el móvil) y además no apoyen sobre los motores.
La construcción comenzaría con el pegado con la pistola termofusible de las caras laterales de dos portapilas de 1,5 V para después situar sobre ambas el perfil que sujeta los motores; una vez que éstos últimos tengan su posición definitiva, podemos fijar los pequeños paneles fotovoltaicos. Como puede observarse en la figura, antes de adherir los dos transistores (centrados en el frontal de los portapilas, a modo de cabeza y mandíbulas del bichoide) he doblado sus patillas unos 45º para que parezcan unas pequeñas antenas.
Como el conexionado es muy sencillo, he esperado a tener todos los elementos pegados sobre el portapilas para abordarlo. Cabe recordar que visto el transistor TIP 120 de frente sus patillas se ordenan alfabéticamente, quedando a la izquierda la base (de donde partirá un cable a conectarse directamente con el polo positivo del panel fotovoltaico), en medio el colector (que se une a través de un conductor con uno de los bornes del motor) y a la derecha el emisor (del que sale un cable que confluye con los cables negros de los polos negativos de la pila y del panel); el borne que ha quedado libre en el motor se conecta con el cable rojo (polo positivo) del portapilas. El proceso se repite para el circuito del otro motor y antes de soldar conviene probar que el panel fotovoltaico escogido genera la suficiente corriente (unos 500 mA nominales) para arrancar los motores al acercar el insectoide a una fuente de luz. e) ConclusiónHe utilizado en los robot-bichos una serie de circuitos simbólicos básicos que son los más comunmente utilizados en los libros de texto para explicar los principios de la electrónica, pero que no suelen pasar de ser unos esquemas gráficos sobre papel que en ocasiones, por falta de medios, no se ponen en práctica para hacerlos más inteligibles y atractivos para el alumno. |